



MODAL SPACE – IN OUR OWN LITTLE WORLD
模态空间 – 在我们自己的小世界中 Pete Avitabile(著) KSI科尚仪器 董书伟(译)
你真的需要测量FRFs吗?或许传递比就可以了吧?
我们需要讨论一下这个问题。
2014年05月06日 发布 ver1.0
在很多情况下,常常测量传递比。这可能是由于在振动台品质试验过程中进行数据采集,在这里,试验对象安装在一个大的振动台上,所有的“被测设备”加速度计测量相对于基础的、施加到试件上的加速度输入。
或者它也有可能是,在运行设备上进行测量,不能测量激振力,只有用加速度计测量的响应结果。当进行飞行试验、汽车测试、悬挂系统测试以及类似试验时,这种情况是非常普遍的。这可能是仅有的数据。但需要注意某些细微的区别。另外非常重要的是,要确认当我们使用所有这些独特的词汇时,我们都使用了相同的术语;有时我发现,名词在不同的行业表示不同的事物,所以核查一下是否理解了定义,总是非常重要的。
所以,先给出几个简单的定义,来解释我们有可能测量的全部结果中的某些差异。如果我们给出下面的定义,
x(t) \quad – 系统的时域输入
y(t) \quad – 系统的时域输出
S_{x}(f) – x(t)的线性傅立叶谱
S_{y}(f) – y(t)的线性傅立叶谱
H(f)\; – 系统传递函数
h(t) \quad – 系统脉冲响应
则图1表示线性谱的输入-输出示意图。
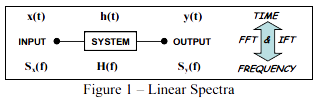
图1 – 线性谱
另外,如果我们给出其他的这些定义,
R_{xx}(t) – 输入信号x(t)的自相关
R_{yy}(t) – 输出信号y(t)的自相关
R_{yx}(t) – y(t)和x(t)的互相关
G_{xx}(f) – x(t)的自功率谱\qquad \quad G_{xx}\left ( f \right )=S_{x}\left ( f \right )\cdot S_{x}^{*}\left ( f \right )
G_{yy}(f) – y(t)的自功率谱\qquad \quad G_{yy}\left ( f \right )=S_{y}\left ( f \right )\cdot S_{y}^{*}\left ( f \right )
G_{yx}(f) – y(t)和x(t)的互功率谱 \quad G_{yx}\left ( f \right )=S_{y}\left ( f \right )\cdot S_{x}^{*}\left ( f \right )
则图2表示功率谱的输入-输出示意图
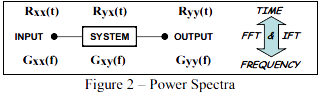
图2 – 功率谱
那么,既然我们已经定义了这些等式,我们就确定一些通常测量的结果,并了解如何用它们计算某些东西,例如,FRF和传递比。
首先要注意的是,线性谱是复数函数,有幅值有相位 – 所以S_{x}和S_{y}是复数线性谱。但是它们的相伴功率谱,G_{xx}和G_{yy}不是复数的,而是实数的,只有幅值测量结果。这点非常重要,因为没有与之相关的相位信息。但要注意互谱G_{yx}是复数,有幅值有相位。
所以我们继续下去,确定FRF和传递比。FRF是互功率谱除以输入功率谱,而传递比仅仅是输出谱除以输入谱。它们如下所示:
所以尽管我们一般说,这二者都测度输出相对于输入的关系,但有很大的差别 – FRF是复数的函数,不但有幅值而且有相位,而传递比(TR)仅仅是幅值之比;这大为不同,因为没有相位信息。但有一个重要的区别。通常,FRF用所测的力作为参考进行测量,而TR不测量通常需要得到的力。对于模型确认、结构动力学修改、系统模型推导、以及强迫响应研究,当需要数据来求取一个校准的模型时,这一点非常重要 – 可以说,需要测量的力来校准模型。
既然已经完成了所有的定义,那么我们来看一看FRF和TR的测量结果,来说明一些区别。用简单的自由-自由梁测量一些典型的结果。第一次测量中,用力锤和加速度计进行驱动点FRF测量。图3显示了驱动点测量结果的对数幅值和相位;注意这个函数是复数的,如图所示。图4显示了从梁的一端到另一端的跨点测量结果的对数幅值和相位;这个测量结果也是复数值的。
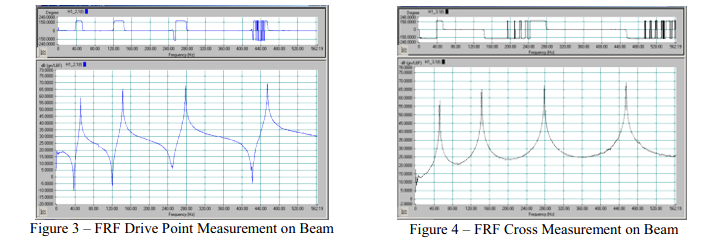
图3 – 梁的驱动点频响测量结果 图4 – 梁的跨点频响测量结果
图5显示了在驱动点测量结果位置的加速度计的自功率谱,而图6显示了跨点位置的加速度计自功率谱。
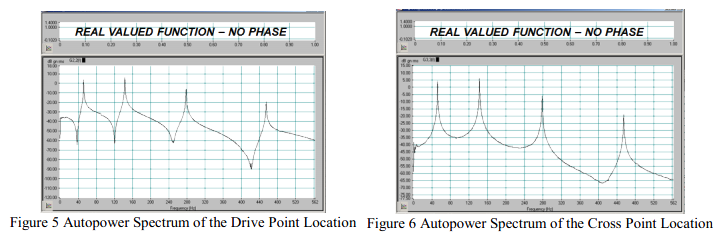
图5 – 驱动点位置的自谱 图6 – 跨点位置的自谱
现在,当比较图3、4中的FRF测量结果时,这两个谱都有某些相同的特征。但有一个非常重要的信息丢失了,它就是测量结果的相位。功率谱是实数函数,没有任何相位信息。所以当彼此之间用幅值联系在一起时,不能从测量结果中得相位信息。
为了具备方向信息,需要得到复数的测量结果,这样就可以包含相位。现在,在这里请不要误会我,因为在很多没有其他测量结果的场合下,传递比是非常有用的。但我们还必须弄清楚,认识到如果想要了解结构的模态振型,还需要某些关键信息。如果你有关于模态分析的任何其他问题,尽管问我好了。
![]()
上一篇:92.模态空间13.04 — 如果试验和模型之间的频率很接近,那么模型是相关的吗?真的必须要观察模态振型吗?
下一篇:94.模态空间13.08 — 如果进行一个逐点移动锤击试验且锤击很多点,有可能丢失某阶模态吗?
![]()
延伸阅读[new]: 《振动:解析与试验模态分析》辛辛那提大学教授Randall J. Allemang博士 编著 KSI科尚仪器 董书伟 翻译…