






MODAL SPACE – IN OUR OWN LITTLE WORLD
模态空间 – 在我们自己的小世界中 Pete Avitabile(著) KSI科尚仪器 董书伟(译)
如果我们进行力锤逐点冲击试验,并且锤击很多点,有可能丢失某阶模态吗?
嗯…在哪儿布置加速度计,你要小心。
2014年05月05日 发布 ver1.0
我很高兴你问了这个问题,因为进行模态试验时,它是一个非常重要的注意事项。我们讨论一下与你问题相关的一些事情。
现在,一把逐点移动的力锤,一个固定不动的加速度计是进行锤击试验的一种方法,很常用。另外一种可以做的锤击试验方法是保持力锤不动,而移动加速度计。做这类试验,这两种方法都是可以接受,并且因为互易性,从理论的角度看,真的没有差别。实际上,如果你考虑一下测量结果,当有一把逐点移动的力锤时,会填满FRF矩阵的一行,如果有一个逐点移动的响应传感器,会填满FRF矩阵的一列。这种情况的示意图如图1所示,同时显示了互易的测量结果。
不论什么时候进行模态试验,你必须时刻小心,以避免让参考点位于某阶模态的节点上。这是最为重要的注意事项。
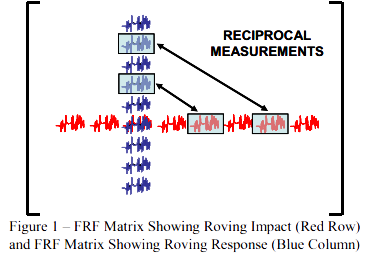
图1 – 频响矩阵,展示出逐点锤击(红色行)和逐点响应(蓝色列)
为了理解这个内容,需要介绍几个描述FRF的基本方程。现在单个FRF“ij”测量结果可以根据留数写成求和的形式,形如
但是在这个留数形式的方程中,要认识到留数意味着什么,可就不那么容易了。但是如果我用表示成模态振型的留数来写这个方程,则
对这个方程,所产生的FRF可能看起来像是图2中所示的FRF,那里显示了两种形式的FRF表达式(并且为了区分单独每阶模态的贡献,用蓝色和红色对FRF求和式中的每一项上了色);图2中,上述方程已经展开为前两项的和,以说明每阶模态对于总体FRF所做的贡献。重要的是认识到,FRF是由各个单独的模态的和构成的。
当我们按照模态振型来写这个方程时,清楚地说明,对于特定的“ij”项,结构的模态振型是如何对FRF的幅值具有强烈影响的。从根本上说,留数是根据比例系数q,模态振型在输出响应位置的值乘以模态振型在输入激励位置的值生成的。这样说来,我认为很显然,如果输出位置抑或输入位置的模态振型值为零(也就是说,位于模态的节点上),那么对于那阶特定的模态,将不会有幅值。

图2 – 频响函数之和
所以既然我们认识到了这一点,同样也很显然,不论什么时候我们在某阶模态的节点位置进行测量,则FRF测量结果中不会有关于那阶模态的明显幅值 – 不管它是激励位置还是响应位置都没关系。
另外,我还应该指出如果参考点跟模态节点离得很近,那么,对于那个特定阶的模态,频响幅值将会很低。实际上,图2中绿色所示的第3阶模态是那种情况的一个最好例证。跟第1阶和第2阶模态相比,那个幅值低,因为对输入和/或输出位置,模态振型的值比第1阶和第2阶模态的小很多;那是幅值为什么更低的原因。
但是就你问过的最初问题而言,真正重要的是参考点的位置 – 不管是固定的力锤作为参考点,还是固定的加速度计作为参考点。如果参考点位于某阶模态的节点上,那么FRF中对于那阶特定的模态将不会有明显的响应。
现在为了进行良好的模态试验,对所有感兴趣的模态,我们需要非常清楚模态振型什么样,这样可以选择合适的参考点。
但是很多时候,在更为复杂的结构或者结构具有非常方向性的模态特性的情况下,选择一个位置,从那一个参考点位置很容易地看到所有阶模态,可能是非常困难甚至是不可能的。这就是为什么很多时候我们用多个参考点进行模态试验的原因。按照这种方法,我们有能力从几个不同的参考点位置看到所有阶模态。
有时,当有4通道采集系统时,我们将用3个加速度计(或者如果有8通道采集系统,将用7个加速度计),固定不动的加速度计布置在结构不同的位置,进行逐点移动力锤锤击模态试验。这样的话,有更好的机会来确保能从所有不同的参考点位置看到所有阶模态。
但愿我们能够选取3个(或7个)位置,据此所有的参考点都没有位于模态的节点位置。实际上,你可能认为选取那么多的参考点并且让它们同时都位于某阶模态的节点上,那几乎是不可能的。
嗯,无巧不成书,我见到有一个模态试验,其中用了9个参考点,在逐点移动力锤的条件下进行测试。你首先想到的可能是,在9个参考点的条件下你怎么可能会有丢失某阶模态的问题呢。难道你不知道吗,全部9个加速度计刚好位于平板某阶模态的节点位置上。图3展示了这个非常难以置信的做过的试验,这里,在9个参考点的情况下,结构的某阶模态丢失了。
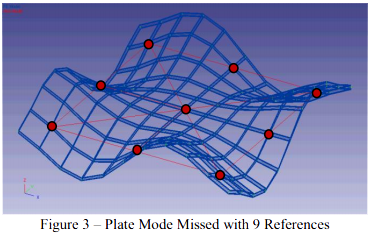
图3 – 丢掉的平板模态,有9个参考点
我希望这有助于说明,当确定模态试验的参考点时,你需要非常小心。如果你有关于模态分析的任何其他问题,尽管问我好了。
![]()
上一篇:93.模态空间13.06 — 你真的要测FRFs吗?或许传递比就够了吧?
下一篇:95.模态空间13.10 — 如果力锤敲击一个节点位置,在其他地方没有响应吗?看上去不是那么回事啊。
![]()
延伸阅读[new]: 《振动:解析与试验模态分析》辛辛那提大学教授Randall J. Allemang博士 编著 KSI科尚仪器 董书伟 翻译…