






MODAL SPACE – IN OUR OWN LITTLE WORLD
模态空间 – 在我们自己的小世界 Pete Avitabile(著) KSI科尚仪器 董书伟(译)
我一直听说SVD,您能为我简单介绍一下吗?当然可以…
我很惊讶你没有更早一些来问这个问题。SVD,奇异值分解可能是最重要的线性代数工具之一,今天我们用它来解决很多结构动力学问题。首先,先介绍一下SVD的数学表达式,以及它的一些变体形式,接着描述一下通常在试验模态分析中它用在什么地方。当然,我会尽量解释SVD的使用及其用途,而不是给出一堆详尽的数学推导。
首先我们必须认识到这里我们要跟矩阵打交道了。(我知道当我们说矩阵的时候,你们都打哆嗦了— 但是我之前就说过“矩阵是你的朋友!”)那么假设我们有某个矩阵[A],它是一个n \times n的方阵。基本的SVD方程是
现在这个表达式看上去比较简单,但我们将某些项展开来看一看SVD的威力所在
将其展开得到
现在这真让人难以置信,因为它指出矩阵A由一组向量和奇异值构成,用它们来描述矩阵。
我们从一个简单的向量、一个特征值开始来说明基本的SVD方程。定义向量、奇异值如下
那么简单地将这些因子乘起来,可得到矩阵A
所以这非常简洁,因为我从一个向量开始,接着构成了一个矩阵。现在这个矩阵显然是一个大小为3 \times 3的矩阵,但我要说它的秩是多少呢?嗯,如果观察矩阵的各个行,我很快会发现第2、3行与第1行线性相关。这意味着尽管我得到了一个3 \times 3的矩阵,但只有一个线性独立信息构成这个矩阵。(我们当然知道这是正确的,因为我们是根据一个向量来构成的矩阵)。我们就可以说这个矩阵的秩是1 — 因为只有一个线性独立信息构成这个矩阵。
现在考虑另外一个简单的向量、一个特征值,如
那么简单地将这些因子乘起来,可以得到矩阵A
同样,对于这个矩阵我可以做出跟我们之前观察过的第1个矩阵完全相同的注释。这个矩阵的秩是1,因为它是根据一个线性独立信息构成的。
现在,我们考虑一个一般形式的矩阵,如
现在这个矩阵是3 \times 3,但对我来讲,我并不清楚它的秩是多少。确定秩的最简单的方法是对矩阵进行SVD。最后的分解结果是
所以SVD的优美之处在于,我可以根据线性独立部分来写矩阵A,线性独立的部分构成矩阵A。这可以按照求和的形式来表示,形如
所以我认为这有助于解释SVD的基本原理。但是现在我需要讨论几个通常会用到SVD的应用场合。(SVD有很多不同的应用,但仅专注于与试验测试相关的一些具体应用)
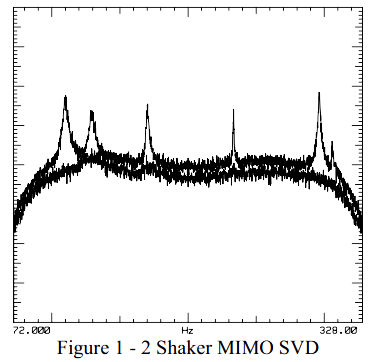
SVD的一个应用是对于试验模态测试,用于MIMO数据的采集。对于所有的MIMO激振器,尽管数据采集系统可能生成不相关的力函数(线性无关),但对每个激振器,实际的激振器激振力或许不能完全无关,这是由于激振器与结构之间存在相互作用造成的。
需要检查输入矩阵的线性无关性。在MIMO数据采集的过程中,激振器的G_{xx}可以用来完成通常所谓的主分量分析。这项技术利用SVD将G_{xx}矩阵进行分解,接下来,在频率基础上,画出每个输入对应的奇异值。如果激振器完全线性无关,那么对于每一个独立的输入,在所有频率上都有一个主奇异值。如图1所示。
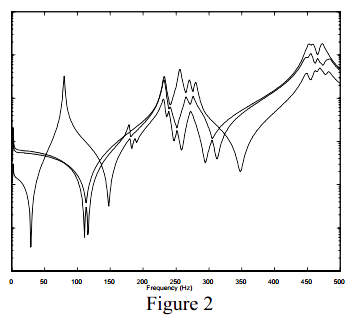
另一个应用是用于模态参数估计。可以利用SVD将不同参考点得到的FRF矩阵进行分解,以确定系统的根(或模态)在什么位置。这种分解是CMIF模态参数估计方法的基础。这个SVD的主奇异值图可以提供图形,用于指示系统模态所在的位置。对有重根的系统,其典型示意图如图2所示。
尽管SVD还有很多其他应用,但我希望这几个例子有助于你更好地理解这项技术。如果你有关于模态分析的任何其他问题,尽管问我好了。
![]()
上一篇:17. 模态空间00.10 — 为什么质量载荷和数据一致性对于模态参数估计是如此之重要?
下一篇:19. 模态空间01.02 — 利用实际工作载荷作为模态试验的激振力有意义吗?
![]()
延伸阅读[new]: 《振动:解析与试验模态分析》辛辛那提大学教授Randall J. Allemang博士 编著 KSI科尚仪器 董书伟 翻译…