



MODAL SPACE – IN OUR OWN LITTLE WORLD
模态空间 – 在我们自己的小世界 Pete Avitabile(著) KSI科尚仪器 董书伟(译)
有人曾告诉我结构动力学修改不起什么作用,因为你得不到系统的全部模态振型。
嗯,那我们来讨论一下这个问题。
在1980年代早期,结构动力学修改(SDM)就已经成为一种广泛使用的工具。由于对这项技术有些误解,可能会得到某些错误的结果。但是在正确的条件下,SDM是一种很强大的工具,可以辅助设计工程师做出很好的设计决策。我们首先简要回顾一下这项技术,并且说明一下这项技术对于它最大的问题 — 模态截断是怎样敏感的。
大致说来,SDM是一种分析工具,当去考察系统的质量、阻尼、和刚度存在少量变化的时候,它利用模态数据(可以是解析的,也可以是试验的)来估计系统的动力学特性将如何变化。注意,仅仅利用模态数据(频率、阻尼、和模态振型)进行预测 — 为了探究这些改变,不需要对原始的FEM或试验数据进行修改。然而,一旦获得了一些想要的变化,那么强烈地推荐重新对修改后的模型进行有限元分析或者重新对修改后的试件进行试验。
可以推导出物理系统方程并得到特征解。模态表达式既可以从解析模型中得到,也可以从试验数据中得到。在模态空间中,物理系统的模态表达式按下式给出
现在,物理系统的质量变化量\Delta M、阻尼变化量\Delta C、和刚度变化量\Delta K,可以在模态空间中表示(通过模态变换方程)如下
假设一个比例阻尼系统,可以得到修改后的系统的特征解。这个解的一个重要部分是根据下式求解系统的最终物理模态
这表明修改后的系统的最终模态是由原始系统无修改模态的线性组合构成的。这是一个重要的方程,我们将它用来说明预测结果的截断影响。
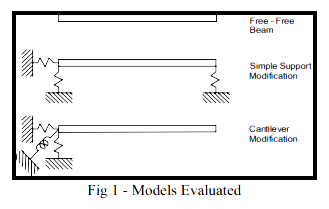
考虑一个简单的自由-自由梁例子,我们将利用它进行两种简单的结构修改 — 简支梁和悬臂梁。将利用两根接地弹簧来修改结构,并求解SDM方程以得到修改频率和模态振型。原始无修改频率和最终修改频率如表1所示(备注:识别出的用斜体表示的频率是系统约束模态的一种近似,超出了本次讨论的范围)。
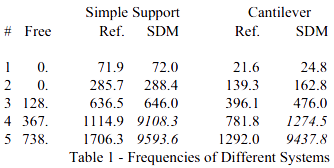
注意,仅仅利用原始无修改系统的前5阶模态,简支梁生成了非常精确的修改模态,而悬臂梁却没有。为什么简支表现得这么好,而悬臂却不行呢?答案在于这些模态振型是怎样由原始系统模态来构成的。
这个简支梁修改后的模态很容易由原始系统无修改模态的线性组合构成。当观察图2时,我们注意到模态1和3是简支梁的第1阶最终修改后的模态的最重要贡献者。而当观察图3时,我们注意到,模态2和4是简支梁的第2阶最终修改后的模态的最重要贡献者。

但是当我考虑悬臂梁修改的模态时,无修改系统的所有5阶模态都有重要的贡献。事实上,需要更多的模态来提高这个悬臂梁预测模态的精度。(备注:悬臂梁的2阶模态如图4所示)
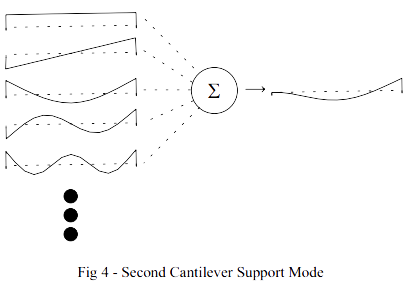
可以证明,简支可以简单地由原始系统已有的5阶自由-自由模态的线性组合构成,而悬臂梁却不能!而事实上没有所有阶模态并不总是问题。真正的问题在于,最终修改后的模态必须能够由原始无修改模态构成。
另一个值得注意的重点是,自由-自由梁的刚体模态对于准确预测修改后的模态非常重要。如果刚体模态不存在,那么这个预测模态将是错误的。对于开发试验模态数据库来说,这是一个重要的注意事项,因为常常不将刚体模态作为试验的组成部分来进行采集。
最重要的一点是,为了利用SDM求取一个准确的修改模型,最终模态必须总是由无修改模态的线性组合构成。如果这是可能的,那么可以得到好的结果。如果这是不可能的,那么由于模态截断将会产生错误。
不去深究所有详尽的方程,用几个简单的图形来说明SDM是如何利用系统无修改模态来获取系统修改后的模态的估计值。我希望这个讨论可以帮助你理解SDM可能受到模态截断的影响。如果你有关于模态分析的任何其他问题,尽管问我好了。
![]()
上一篇:15. 模态空间00.06 — 进行模态试验时,多少测点才够用?
下一篇:17. 模态空间00.10 — 为什么质量载荷和数据一致性对于模态参数估计是如此重要?
![]()
延伸阅读[new]: 《振动:解析与试验模态分析》辛辛那提大学教授Randall J. Allemang博士 编著 KSI科尚仪器 董书伟 翻译…