3.1 理论
与前面所讨论的单自由度质量-弹簧-阻尼系统相比,大多数结构通常更为复杂。我们将利用一般情形的多自由度系统来说明结构频响函数是如何与模态向量联系起来的。下面将用如下的两自由度系统来阐述所讨论的概念。
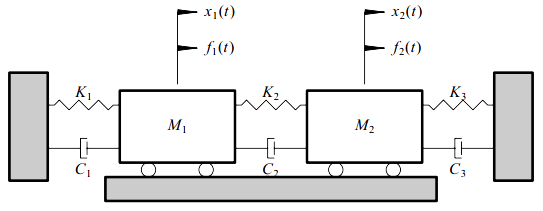
图3-1. 两自由度系统
上述系统的运动方程为:
M_{1}\ddot{x}_{1}(t)+(C_{1}+C_{2})\dot{x}_{1}(t)-C_{2}\dot{x}_{2}(t)+(K_{1}+K_{2})x_{1}(t)-K_{2}x_{2}(t)=f_{1}(t)
M_{2}\ddot{x}_{2}(t)+(C_{2}+C_{3})\dot{x}_{2}(t)-C_{2}\dot{x}_{1}(t)+(K_{2}+K_{3})x_{2}(t)-K_{2}x_{1}(t)=f_{2}(t)
写成矩阵形式:
\begin{bmatrix} M_1 &0 \\ 0 & M_2 \end{bmatrix}\begin{Bmatrix} \ddot{x}_{1}(t)\\ \ddot{x}_{2}(t) \end{Bmatrix}+\begin{bmatrix} (C_1+C_2) &-C_2 \\ -C_2 & (C_2+C_3) \end{bmatrix}\begin{Bmatrix} \dot{x}_{1}(t)\\ \dot{x}_{2}(t) \end{Bmatrix}
+\begin{bmatrix} (K_1+K_2) &-K_2 \\ -K_2 & (K_2+K_3) \end{bmatrix}\begin{Bmatrix} x_{1}(t)\\ x_{2}(t) \end{Bmatrix} = \begin{Bmatrix} f_{1}(t) \\ f_{2}(t) \end{Bmatrix} \qquad (3.1)
上述方程仍然为二阶线性时不变微分方程,但是现在它们通过坐标选择而耦合在一起。因此,这个系统方程必须同时进行求解。下面将按照解析方式来说明方程组3.1的求解过程。从式3.1的微分方程组的齐次解可以得到模态向量及频率。
首先对无阻尼系统来求解上述系统的二阶微分方程,假设C_1 = C_2 = C_3 = 0。
[M]\left \{ \ddot{x}(t)\right \}+[K]\left \{x(t)\right \}=\left \{f(t)\right \} \qquad \qquad (3.2)
其中:
- [M]=\begin{bmatrix} M_1 &0 \\ 0 &M_2 \end{bmatrix}=质量矩阵
- [K]=\begin{bmatrix} (K_1+K_2) &-K_2 \\ -K_2 &(K_2+K_3) \end{bmatrix}=刚度矩阵
- \left \{ f \right \}=\begin{Bmatrix} f_{1}(t)\\ f_{2}(t) \end{Bmatrix}=力向量
- \left \{ x \right \}=\begin{Bmatrix} x_{1}(t)\\ x_{2}(t) \end{Bmatrix}=响应向量
因为力向量和响应向量总是时间的函数,所以在后面的方程中将舍去函数符号(t)。
式3.2所代表的系统方程具有如下通解:
\left \{ x \right \}=\left \{ X \right \}e^{st}
因此:
\left \{ \dot{x} \right \}=s \left \{ X \right \}e^{st}=s\,x
\left \{ \ddot{x} \right \}=s^{2}\left \{ X \right \}e^{st}=s^{2}\,x \qquad (3.3)
其中:
将式3.3代入式3.2 ,得到:
s^{2}[M]\left \{ X \right \}+[K]\left \{ X \right \}=\left \{ f \right \}
如果没有施加作用力,即 \left \{ f \right \}= \left \{ 0 \right \},则有:
s^{2}[M]\left \{ X \right \}+[K]\left \{ X \right \}=\left \{ 0 \right \}
\big (s^{2}[M]+[K] \big ) \left \{ X \right \}=\left \{ 0 \right \} \qquad (3.4)
式3.4不过是X_i的一组联立代数方程。未知数是X及s。根据微分方程理论,式3.4要有非零解,\left \{ X \right \} \neq \left \{0 \right \},其系数行列式须为0。系数行列式是s^2的多项式。这个多项式的根称为特征值。
要将式3.4化为标准的特性值-特性向量的形式,可以按照多种不同的方式进行整理。首先,将式3.4除以s^2并左乘[K]^{-1}。
\big [[K]^{-1}[M]+ \dfrac{1}{s^2}[I] \big ] \left \{X \right \} = \left \{0 \right \} \qquad (3.5)
构建特征值问题的另外一种方式是将式3.4左乘[M]^{-1}。注意这样处理之后,得到的动力学矩阵,式3.5中的[K]^{-1}[M]或式3.6中的[M]^{-1}[K],不再是对称阵。
\big [[M]^{-1}[K]+ s^{2}[I] \big ] \left \{X \right \} = \left \{0 \right \} \qquad (3.6)
式3.5中的特征值为\dfrac{1}{s^2},而式3.6中的特征值为s^{2}。式3.5与3.6式互逆。在式3.5或式3.6中,通常称方程左侧的矩阵为动力学矩阵。注意,式3.4与一个矩阵相乘后得到式3.5或3.6相当于进行坐标变换。
用特征值来定义振动模态的频率。称式3.5或3.6中与某个特征值对应的解向量\left \{X \right \}为特征向量、本征矢量、模态振型或模态向量。X代表某个特定振动频率下的结构变形模式。因为式3.5或3.6是齐次的,故X解不唯一;只能得到X的相对形式或比值。换句话讲,可以根据X的其中一个解得到X的所有解,可以赋它为任意值。从数学意义上讲,式3.5或3.6所示方程组的秩总是等于方程数减1。
因而结构变形是根据结构上不同点的运动幅值比来定义的,它描述了固有振动模态。所以一个结构的实际振动幅度是模态向量,量级,位置和激振力特性综合作用的结果,而不是固有振动模态的直接特性。振动幅度实际上取决于系统激励的作用位置、幅度、系统初始条件以及由特征值和特性向量所描述的结构属性。
3.2 解特征值问题
我们可知式3.5或3.6为齐次方程组,因此它们要有非零解,系数行列式必须为零。
\left | [K]+s^{2}[M] \right | =0 \qquad \qquad \qquad (3.7a)
\left |[M]^{-1} [K]+s^{2}[I] \right | =0 \qquad \qquad (3.7b)
\left |[K]^{-1} [M]+\dfrac{1}{s^{2}}[I] \right | =0 \qquad \qquad (3.7c)
称式3.7中的行列式为特征行列式。展开特征行列式得到特征方程或者频率方程。
式3.7可写成如下形式:
\alpha^{n}+a_{1} \alpha^{n-1}+a_{2} \alpha^{n-2}+ \, \cdots \, + a_{n}=0 \qquad (3.8)
式3.8为N自由度系统的特征方程,其中,对式3.7a或3.7b来讲, \alpha = s^{2},而对式3.7c来讲,\alpha = \dfrac{1}{s^2}。式3.8的根为系统的特征值。注意,对应于式3.8根的s值是复数的模态频率(\lambda_{r}=\alpha_{r}+j \omega_{r})。
3.2.1 两自由度系统示例:无阻尼、齐次
假设一个两自由度系统(式3.1),求解这个无阻尼系统的特征值(无阻尼固有频率)及相应的特征向量(模态向量)。
参考图(3-1),使:
- M_{1}=5 \qquad \qquad M_{2}=10
- K_{1}=2 \qquad \qquad K_{2}=2 \qquad \qquad K_{3}=4
代入式3.1:
\begin{bmatrix} 5 & 0\\ 0 & 10 \end{bmatrix}\begin{Bmatrix} \ddot{x}_{1}\\ \ddot{x}_{2} \end{Bmatrix}+\begin{bmatrix} 4 & -2\\ -2 & 6 \end{bmatrix}\begin{Bmatrix} x_{1}\\ x_{2} \end{Bmatrix}=\begin{Bmatrix} 0\\ 0 \end{Bmatrix}
则这个特征值问题变为(式3.5):
\begin{bmatrix} \begin{bmatrix} 4 & -2\\ -2 & 6 \end{bmatrix}^{-1} \begin{bmatrix} 5 & 0 \\ 0 & 10 \end{bmatrix} +\dfrac{1}{s^2}\begin{bmatrix} 1& 0\\ 0 & 1 \end{bmatrix} \end{bmatrix} \begin{Bmatrix} x_{1}\\ x_{2} \end{Bmatrix}=\begin{Bmatrix} 0\\ 0 \end{Bmatrix}
\begin{bmatrix} \begin{bmatrix} \dfrac{3}{10}& \dfrac{1}{10} \\ \dfrac{1}{10} & \dfrac{1}{5} \end{bmatrix}^{-1} \begin{bmatrix} 5 & 0 \\ 0 & 10 \end{bmatrix} +\dfrac{1}{s^2}\begin{bmatrix} 1& 0\\ 0 & 1 \end{bmatrix} \end{bmatrix} \begin{Bmatrix} x_{1}\\ x_{2} \end{Bmatrix}=\begin{Bmatrix} 0\\ 0 \end{Bmatrix}
或:
\begin{bmatrix} \dfrac{3}{2}+\dfrac{1}{s^2} &1 \\ \dfrac{1}{2}&2+\dfrac{1}{s^2} \end{bmatrix} \begin{Bmatrix} x_{1}\\ x_{2} \end{Bmatrix}= \left \{ 0 \right \} \qquad \qquad (3.9)
要有非零解,式3.9系数矩阵的行列式必须等于零。
(\dfrac{3}{2}+\dfrac{1}{s^2})(2+\dfrac{1}{s^2})-\dfrac{1}{2}=0
用\alpha = \dfrac{1}{s^2}作变量替换,特征方程变为:
\alpha ^{2}+\dfrac{7}{2} \alpha+\dfrac{5}{2}=0 \qquad \qquad (3.10)
式3.10的根为:
\alpha _{1,2}=\dfrac{\dfrac{-7}{2} \pm \sqrt{49/4-10} }{2} = \dfrac{-7}{4} \pm \dfrac{\sqrt{9/4}}{2}
\alpha _{1}=\dfrac{-5}{2}
\alpha _{2}=-1
注意变量替换\alpha = \dfrac{1}{s^2}:
\alpha _{1}=\dfrac{1}{\lambda_{1}^{2}} \qquad \qquad \alpha _{2}=\dfrac{1}{\lambda_{2}^{2}}
因为\lambda_{r}=\sigma_{r} \pm j \omega_{r},则复值模态频率为:
\lambda_{1}=\sigma_{1} \, \pm \, j \omega_{1} = \pm \,j \, \omega _{1} = \pm \, j \, \sqrt{2/5}
\lambda_{2}=\sigma_{2} \, \pm \, j \omega_{2} = \pm \, j \, \omega _{2} = \pm \, j \, 1
现在,可以将频率\omega_{1}和\omega_{2}用于式3.9来确定模态向量。
利用下列方程来确定相对于\lambda_{1} = \pm \, j \, \omega_{1}的模态向量:
\begin{bmatrix} -1 & 1 \\ \dfrac{1}{2} & \dfrac{-1}{2} \end{bmatrix} \begin{Bmatrix} X_{1} \\ X_{2} \end{Bmatrix}= \left \{ 0 \right \}
或:
-X_{1}+X_{2}=0
X_{2}=X_{1}
因此,对应固有频率\omega_{1}的模态向量为:
\left \{ \psi \right \}_{1} = \begin{Bmatrix}X_{1} \\ X_{1} \end{Bmatrix}_{1}
其中:
同样,对于\lambda_{2}= \pm \, j \omega _{2},模态向量为:
\begin{bmatrix} \dfrac{1}{2} & 1 \\ \dfrac{1}{2} & 1 \end{bmatrix} \begin{Bmatrix} X_{1} \\ X_{2} \end{Bmatrix}= \left \{ 0 \right \}
或:
\dfrac{1}{2}X_{1}+X_{2}=0
X_{2}=\dfrac{-1}{2}X_{1}
或:
\left \{ \psi \right \}_{2} = \begin{Bmatrix}X_{1} \\ \dfrac{-X_{1}}{2} \end{Bmatrix}_{2}
如果变形X_{1} = 1,它是根据归一化方法确定的一个任意值,因此:
对\omega_{1}=\sqrt{2/5}:
\left \{ \psi \right \}_{1} = \begin{Bmatrix} 1 \\ 1 \end{Bmatrix}_{1}
对\omega_{2}=1:
\left \{ \psi \right \}_{2} = \begin{Bmatrix} 1 \\ -\dfrac{1}{2} \end{Bmatrix}_{2}
3.3 模态向量加权正交性
对式3.5所列的特征值问题进行求解得到N个固有频率\lambda_{r}以及N个模态向量\left \{ \psi \right \}_{r},其中N为系统的自由度数目。
注意,任意一个特定的无阻尼固有频率及相应的模态向量\left \{ \psi \right \}_{r}都满足式3.4。因此,将s=\lambda_{r}及\left \{ X \right \} = \left \{ \psi \right \}_{r}代入式3.4,得到:
\lambda_{r}^{2}[M] \left \{ \psi \right \}_{r}= -[K] \left \{ \psi \right \}_{r} \qquad (3.11)
现在,在式3.11两侧左乘一个不同的模态向量,\left \{ \psi \right \}_{s}^{T},则有:
\lambda_{r}^{2}\left \{ \psi \right \}_{s}^{T}[M] \left \{ \psi \right \}_{r}= -\left \{ \psi \right \}_{s}^{T}[K] \left \{ \psi \right \}_{r} \qquad (3.12)
其中上角标T表示矩阵转置。
根据矩阵乘积转置的矩阵代数法则:
\big [[C][D] \big ]^{T}=[D]^{T}[C]^{T}
对式3.12两侧进行转置运算,得到:
\lambda_{r}^{2}\left \{ \psi \right \}_{r}^{T}[M] \left \{ \psi \right \}_{s}= -\left \{ \psi \right \}_{r}^{T}[K] \left \{ \psi \right \}_{s} \qquad (3.13)
其中:
- [M]^{T}=[M],因为[M]为对称阵
- [K]^{T}=[K],因为[K]为对称阵
接下来,将s = \lambda_{s} 及\left \{ X \right \} = \left \{ \psi \right \}_{s}代入式3.4,两侧左乘\left \{ \psi \right \}_{r}^{T} 。则有:
\lambda_{s}^{2}\left \{ \psi \right \}_{r}^{T}[M] \left \{ \psi \right \}_{s}= -\left \{ \psi \right \}_{r}^{T}[K] \left \{ \psi \right \}_{s} \qquad (3.14)
式3.13减式3.14,给出:
(\lambda_{r}^{2}-\lambda_{s}^{2})\left \{ \psi \right \}_{r}^{T}[M] \left \{ \psi \right \}_{s}= 0 \qquad (3.15)
如果r \neq s(假设两个不同的频率),由此可见:
\left \{ \psi \right \}_{r}^{T}[M] \left \{ \psi \right \}_{s}= 0 \qquad (3.16)
根据式3.14,可得如下结论:
\left \{ \psi \right \}_{r}^{T}[K] \left \{ \psi \right \}_{s}= 0 \qquad (3.17)
式3.16和式3.17分别是相对于系统质量矩阵和刚度矩阵的模态向量加权正交性的表达式。正交的概念可以从向量分析的角度来看。在向量分析中,如果两个向量的点积为零,则其正交。这意味着一个向量在另一个向量上的投影为零。因此,这两个向量相互正交。一个显然的例子是三维笛卡尔坐标系。笛卡尔坐标系的单位向量i,j,k彼此两两正交。n自由度系统的模态向量可以看作仅仅是n维空间的一个向量,不幸的是,它不能可视化。模态向量间为了正交,一个简单的点积是不够的。必须使用加权点积的概念,其中加权矩阵为理论上的质量矩阵或刚度矩阵。例如,如果式3.16中的质量矩阵为单位阵,则加权点积可以简化为点积,并且可以得到与笛卡尔坐标系类似的单位向量正交条件。因为式3.16及式3.17中的质量矩阵和刚度矩阵通常不是单位阵,因此这两个式子的正交关系通常被称为加权正交。
如果两个模态向量恰好具有相同的频率\lambda_{r}=\lambda_{s}(式3.15),则其相应的模态向量不一定相互正交。这种情况称为重根或重极点,将在后面的章节中进一步讨论它。在这种情况下,与重根相关的模态向量将与其他模态向量正交,并相互独立。
在式3.15中,如果用相同的模态向量同时左乘和右乘质量矩阵,则式16等于某个不为零的标量常数,一般标识为M_r,因而:
\left \{ \psi \right \}_{r}^{T}[M] \left \{ \psi \right \}_{r}= M_{r}= \, 模态质量 \qquad (3.18)
同理,根据式3.4可得:
\left \{ \psi \right \}_{r}^{T}[K] \left \{ \psi \right \}_{r}= \omega _{r}^{2} M_{r}=K_{r}= \, 模态刚度 \qquad (3.19)
如前所示,因为任一特定模态向量(特征向量)的幅值完全是任意的,因此模态向量可以按任意方式进行归一。这意味着M_r是不唯一的。
例如,进行模态向量归一的一个通用规则是将式3.18中的M_r归一。
按这种方式归一的模态矢量通常称为正交模态向量(特征向量)。
…未完待续…