《振动:解析与试验模态分析》 辛辛那提大学 Randall J. Allemang教授 (著),KSI科尚仪器 董书伟 (译)
在本节中,将解释建立完整的频响函数矩阵
[H(\omega)]的方法。由
N_{o} \times N_{i}个频响函数组成的频响函数矩阵
[H(\omega)],可以通过利用来自于
N_{o}个频响函数的数据来合成,其中
N_{o}为结构上的测量响应自由度数(物理响应点乘以每个物理点位置的方向数)。在下面讨论中,假设
N_{o}大于
N_{i},并且假设
N_{o}包含
N_{i}个测量自由度。对于输入点很多,而响应自由度固定的情形(例如,锤击测试),
N_{i}将远大于
N_{o}。但是因为
[H(\omega)]满足互易性,对于
N_{i}也可以做相同的假设。对于所有的测试情况,这些是合理的假设。从只有
N_{o}或
N_{i}个频响函数中能够准确地合成完整的矩阵,要有两个限制条件。首先,
N_{o}或
N_{i}个频响函数必须包含频响函数矩阵的完整一行或完整一列。再者,在感兴趣的频率范围内,对结构中存在的每个模态向量,
N_{o}或
N_{i}个频响函数必须含有非零的留数信息。这意味着,如果模态向量全为零(因为在模态向量的节点位置进行激励),则不可能合成正确的频响函数。
重写部分分式形式的频响函数矩阵[H(\omega)](式4.25)的通式如下:
\left [ H\left ( \omega \right ) \right ]=\begin{bmatrix} H_{11}\left ( \omega \right ) &H_{12}\left ( \omega \right ) & \cdot & \cdot & H_{1m}\left ( \omega \right ) \\ H_{21}\left ( \omega \right ) & \cdot &\cdot & \cdot &\cdot \\ \cdot &\cdot & \cdot & \cdot &\cdot \\ \cdot & \cdot &\cdot &\cdot & \cdot \\ H_{m1}\left ( \omega \right ) & \cdot & \cdot & \cdot & H_{mm}\left ( \omega \right ) \end{bmatrix}\qquad (6.1)
假设仅仅测量了[H(\omega)]的第k列频响函数,则第k列可以表示如下:
\begin{bmatrix} H_{1k}(\omega)\\ H_{2k}(\omega)\\ \cdot \\ \cdot \\ H_{ik}(\omega)\\ \cdot \\ \cdot \\ H_{mk}(\omega) \end{bmatrix}= \displaystyle\sum_{i=1}^{N}\dfrac{\left \{ A_r \right \}_k}{(j\omega-\lambda_r)}+\dfrac{\left \{ A_{r}^{*} \right \}_k}{(j\omega-\lambda_{r}^{*})} \qquad (6.2)
其中:
式6.2是在结构测试过程中得到的N_o个频响函数测量结果的数学描述。对于每一组N_o频响函数,利用模态参数估计算法可以确定N个模态频率和N个留数。
一旦这些模态参数已知之后,对于想要得到的特定输入和输出自由度,利用带有正确留数的部分分式模型,辄可以从频响函数矩阵中的第k列或任意其它列来合成频响函数。对于每阶模态,合成的公式表示是建立在一个频率挨着一个频率基础之上的 —— 每阶模态的响应叠加在一起得到总的频响函数,如下面几幅图所示。
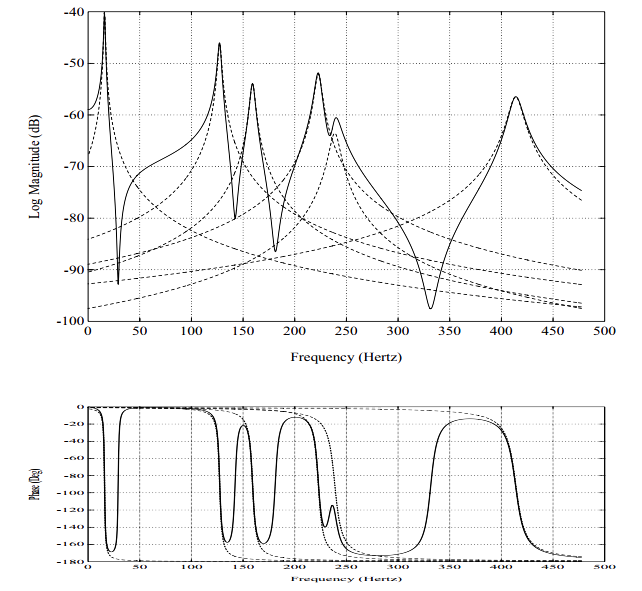
图6-1. 频响函数合成
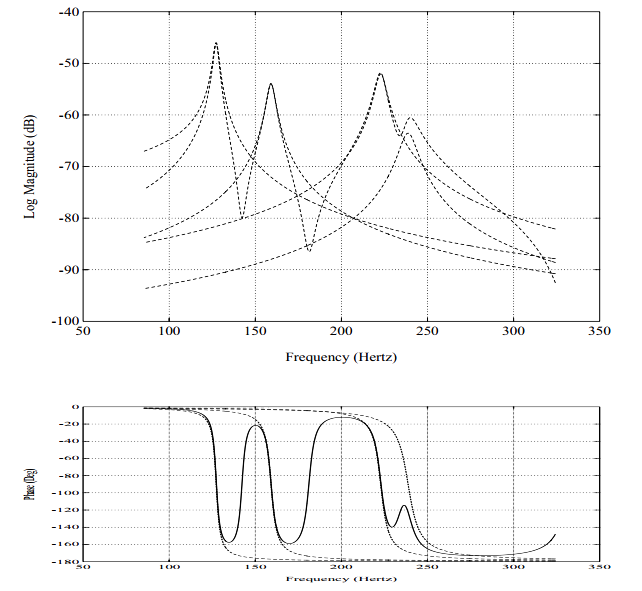
图6-2. 频响函数合成
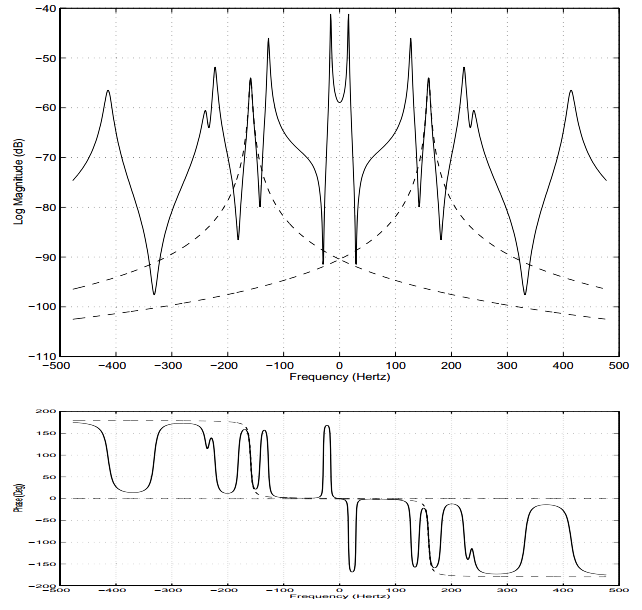
图6-3. 频响函数合成
为了构造组成[H(\omega)]矩阵的所有元素,需要每阶模态的[A]_r中的所有元素。前面已经说明,根据下面的公式,某阶模态的留数矩阵[A]_r与模态向量直接相关:
[A_r]=Q_{r}\left \{ \psi \right \}_{r}\left \{ \psi \right \}_{r}^{T}= Q_{r}\begin{bmatrix} \psi _{1}\psi _{1} & \psi _{1}\psi _{2} & \cdot & \cdot & \cdot & \cdot & \psi _{1}\psi _{m}\\ \psi _{2}\psi _{1} & \psi _{2}\psi _{2} & \cdot & \cdot & \cdot & \cdot & \cdot \\ \cdot & \cdot & \cdot & \cdot & \cdot & \cdot & \cdot \\ \cdot & \cdot & \cdot & \cdot & \cdot & \cdot & \cdot \\ \psi _{m}\psi _{1} & \psi _{m}\psi _{2} & \cdot & \cdot & \cdot & \cdot & \psi _{m}\psi _{m} \end{bmatrix}_r \qquad (6.3)
当测得[H(\omega)]的第k列之后,就可以确定每阶留数[A]_r的第k列。现在,只针对第r阶模态的第k列,式6.3重写为
\begin{bmatrix} A_{1k}\\ A_{2k}\\ \cdot \\ \cdot \\ A_{ik}\\ \cdot \\ \cdot \\ A_{mk} \end{bmatrix}_r=Q_{r}\begin{bmatrix} \psi_{1} \psi_{k}\\ \psi_{2} \psi_{k}\\ \cdot \\ \cdot \\ \psi_{i} \psi_{k}\\ \cdot \\ \cdot \\ \psi_{m} \psi_{k} \end{bmatrix}_r=Q_{r}\psi_{kr}\begin{bmatrix} \psi_{1}\\ \psi_{2} \\ \cdot \\ \cdot \\ \psi_{i}\\ \cdot \\ \cdot \\ \psi_{m} \end{bmatrix}_r \qquad (6.4)
其中:
- m=\, 测量数(N_{o}或N_{i})
- r=\, 第r阶模态
为了计算每一阶振动模态留数矩阵中任意位置的留数,可以利用式6.4来计算Q_r和\left \{\psi \right\}_{r}的值。为此,必须根据某种归一准则来选择Q_r或\left \{\psi \right\}_{r}。就此,可以确定\left \{\psi \right\}_{r}的每个元素。一旦这些元素已知之后,则可以利用下面的公式来计算给定某阶的任一留数:
A_{pqr}=Q_{r}\psi_{pr}\psi_{qr} \qquad (6.5)
若要计算模态质量,则需要Q_r和\left \{\psi \right\}_{r}的每个值。因此,利用式6.5可以很容易地合成任意留数。为了合成另一个留数,实际上没有必要知道Q_r和\left \{\psi \right\}_{r}的每个值。如再次利用留数矩阵[A]的第k列来合成其他位置的任意留数,则下式即是全部所需:
A_{pqr}=\dfrac{A_{pkr}A_{qkr}}{A_{kkr}}=\dfrac{Q_{r}\psi_{pr}\psi_{kr}Q_{r}\psi_{qr}\psi_{kr}}{Q_{r}\psi_{kr}\psi_{kr}} \qquad (6.6)
注意,如果频响函数矩阵的合适元素,继而每个留数矩阵[A]_{r}的合适元素测得之后,利用式6.6,就可以合成任意留数。例如,如果已经测得了下列元素,就没有必要直接测量任何留数矩阵的第k列的驱动点信息。
A_{kkr}=\dfrac{A_{pkr}A_{qkr}}{A_{pqr}} \qquad (6.7)
当考虑测量驱动点频响函数包含的误差时,式6.7可能是一种更可取的估计驱动点信息的方法,尽管这种方法需要留数矩阵的其它列信息。注意在结构测试过程中,这需要另外选一个激励位置。
总的来说,为了合成频响函数矩阵中的任意元素,必须测量包含驱动点信息在内的频响函数矩阵的一行或一列。接着,对这些测量数据利用模态参数估计算法确定模态参数。利用某阶振动模态的驱动点留数信息,通过式6.5或式6.6可以合成任何其他需要的留数信息。
6.1 位移、速度和/或加速度数据
在实践中,经常用加速度传感器测量系统响应,用力传感器测量系统输入来测得频响函数。也可以用速度或位移传感器来测量响应,但是这些传感器具有尺寸大小、设置或者数据方面的缺点。无论如何,推导的数学模型是位移相对于力进行归一的一种表示。注意,如果实际上测得了对力归一的速度,通过将速度比力的测量值除以j\omega,这个数据可以积分成位移比力。如果实际上测得了对力归一的加速度,通过将加速度比力除以(j\omega)^{2},同样,这个数据可以积分成位移比力。这个方法在接近零频时有数值问题,但在其它频率处,通常是符合要求的。
6.2 传感器斜向安装
将所有传感器(输入和输出)在方向上与正交轴系(x , \, y, \, z)朝向一致,尽管这很常见并且在某种程度上也希望如此,但这不是必要条件。可以利用方向余弦信息按照任意希望的轴系来重新定向传感器信息。注意,从这个意义上讲,用于这个点(例如pq)的空间下脚标不表示任何特定约束。
但是,如果希望进行模态归一或者希望能合成可测或不可测的任意频响函数,那么驱动点信息的测量结果是非常重要的。如果用了一个斜向激励,而一组响应传感器完全相互正交,这个问题的最简单解决方案是在激励位置增加一个斜向的响应传感器,这样可以得到真实的驱动点测量结果。记住这一点,当根据斜向输入得到的数据来合成的留数和频响函数由第k列所表示时,式6.1~6.7仍然有效。
6.3 结构响应仿真
一旦某个系统的所有频响函数(传递函数)测得或合成之后,可以仿真或预测结构对于任意输入的响应。为了说明这个过程,可以用下式所表示的两自由度系统作为例子。
\begin{Bmatrix} X_1(\omega)\\ X_2(\omega) \end{Bmatrix}=\begin{bmatrix} H_{11}(\omega) & H_{12}(\omega)\\ H_{21}(\omega) & H_{22}(\omega) \end{bmatrix}\begin{Bmatrix} F_1(\omega)\\ F_2(\omega) \end{Bmatrix} \qquad (6.8)
式6.8是式4.9(s=j\omega)的频响函数形式。式6.8中的矩阵方程可以展开,如下所示:
X_1(\omega)=H_{11}(\omega)F_{1}(\omega)+H_{12}(\omega)F_{2}(\omega)
X_2(\omega)=H_{21}(\omega)F_{1}(\omega)+H_{22}(\omega)F_{2}(\omega)
注意X_1(\omega)和X_2(\omega)是力F_1(\omega)和F_2(\omega)引起的系统响应(频域内)。因此,X_1(\omega)和X_2(\omega)可以由已知频响函数与激励函数的乘积并求和来确定。那么,系统的时域响应x_1(t)和x_2(t)可以通过对X_1(\omega)和X_2(\omega)取傅里叶逆变换计算得到。
这个合成方法可以扩展到多于两自由度的系统。通常,对于一个N自由度系统:
\begin{Bmatrix} X_1(\omega)\\ X_1(\omega)\\ \cdot \\ \cdot \\ \cdot \\ X_N(\omega) \end{Bmatrix}=\begin{bmatrix} H_{11}\left ( \omega \right ) &H_{12}\left ( \omega \right ) & \cdot & \cdot & \cdot & \cdot & H_{1N}\left ( \omega \right ) \\ H_{21}\left ( \omega \right ) & H_{22}\left ( \omega \right ) &\cdot & \cdot & \cdot & \cdot & H_{2N}\left ( \omega \right ) \\ \cdot &\cdot & \cdot &\cdot & \cdot & \cdot &\cdot \\ \cdot &\cdot & \cdot &\cdot & \cdot & \cdot &\cdot \\ \cdot & \cdot &\cdot & \cdot &\cdot & \cdot & \cdot \\ H_{N1}\left ( \omega \right ) & H_{N2}\left ( \omega \right ) & \cdot & \cdot & \cdot & \cdot & H_{NN}\left ( \omega \right ) \end{bmatrix} \begin{Bmatrix} F_1(\omega)\\ F_1(\omega)\\ \cdot \\ \cdot \\ \cdot \\ F_N(\omega) \end{Bmatrix}\qquad (6.9)
尽管式6.9是按照自由度数N写的,这是有限的理论上的考虑。通常,式6.9可以按照任意输入数和输出数写,所以[H(s)]不再是方阵。
举例,时域响应x_1(t)就是X_1(\omega)的傅里叶逆变换,其中:
X_1(\omega)=H_{11}F_1(\omega)+H_{12}F_2(\omega)+\cdots \quad +H_{1N}F_N(\omega)
从理论上讲,一个N自由度系统的传递函数矩阵[ H(s) ]包括N \times N个传递函数。从实际的角度看,传递函数的测量部分(频响函数矩阵)将包括N_o \times N_i 个频响函数,而不管模态阶数N是多少。

上一章 第5章 一般阻尼系统 – 振动:解析与试验模态分析
下一章 第7章 模态归一 – 振动:解析与试验模态分析
返回《振动:解析与试验模态分析》中文翻译目录

扩展阅读[new]:
《模态空间系列文章》Peter Avitabile教授(著) KSI科尚仪器 董书伟 (译)…
《振动:试验模态分析》辛辛那提大学Randall J. Allemang教授(著) KSI科尚仪器 董书伟(译)…[new]