






MODAL SPACE – IN OUR OWN LITTLE WORLD
模态空间 – 在我们自己的小世界中 Pete Avitabile(著) KSI科尚仪器 董书伟(译)
你如何选择模态试验的参考点位置?需要考虑什么?
我们讨论一下这个问题来看一看如何考虑它。
2014年05月17日 发布 ver1.0
现在,选择参考点位置是进行试验模态测试的非常重要的步骤之一。如果参考点位置(一个或多个)选得糟糕,那么非常有可能,系统的一阶或多阶模态可能会表现的很差,或者,最坏情况下,根本没有。如果过去曾经多次测试过类似的结构,那么常常根据先验知识选择参考点,在这种情况下,选择就简单多了。但是当结构独特、没有以前的经历,那么参考点的选择会复杂得多。显然,这些情况下,经验优先。另外也许有分析模型可以帮助选择参考点。所以我们讨论一些基础知识,并说一说选择参考点位置(一个或多个)时的一些考虑事项。
真正要说明的第一件事情是决定参考点选择的基本方程。就像我总是对我所有学生讲的那样,“记住…非常简单的\large \it{u_{i}u_{j}}是你绝大多数模态问题的最重要答案”。当然,学生们都取笑我这个说了一遍又一遍,但最终他们认识到,他们的大多数模态问题常常就是用这句话来回答的!那么我这样说是什么意思。回忆一下,留数按如下形式给出
但我们没有采集全部的这些输入输出组合(并且理论告诉我们,当然也没有必要全部测量它们)。所以需要非常仔细地选择测量哪些行或列。如果我们观察一列,可以写成
显然对所有需要测量的模态,参考点位置的模态振型值必须比较显著。如果这样的话,则测得的FRFs将具有很强的系统模态响应。但是对某阶或多阶系统模态,如果参考点位置的模态振型值不明显的话,则FRFs可能不含有系统所有阶模态的强响应。这会使得模态参数估计过程更加困难。
所以,如果有分析模型,则可以观察模态振型来选择最优的参考点位置。常用的一个简单工具是驱动点留数。一般来讲,这是模态振型的估量,表示为留数
这是用于初期评估的通用工具,通常称为预试验分析。当然还有其他工具,例如模态振型和,MODMAC,有效独立性,以及超出在这里能够讨论的其他工具。但是,如果没有有限元模型,怎么办呢?或者(让我悄悄地这么说)如果模型不正确,怎么办呢?所以我们需要在没有任何先验知识或者没有分析模型帮助的情况下,能够选择参考点。
所以很多时候进行试验设置,首先要做的是进行预试验,来确定结构上可能存在多少阶模态。有时,检验驱动点FRFs – 可能的情况下,观察FRF的虚部。遗憾的是,这可能不是一个用来观察的较好的测量结果。这是由于可能很难识别密集模态,因为函数中FRF虚部的所有峰将具有同为正或同为负的峰。实际上,非驱动点测量结果更好,因为幅值可以既为正又为负,使得有更好的机会来确定密集模态。例如,图1所示的两次测量结果。上面的曲线是驱动点FRF,在第1个峰上不可能确定有两阶模态。下面曲线是跨点测量结果,很明显在那个频率上有两阶模态。所以你可以发现,驱动点测量结果有用但也可能带有欺骗性,因为各阶模态的强度在测量结果中不明显。
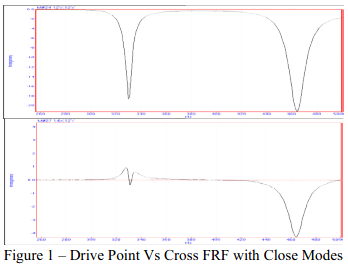
图 1 – 密集模态下的驱动点频响和跨点频响对比
进行模态试验设置时,有时,凭知识或经验猜想什么可能是合理参考点的情况下,随便测得一个FRF样本。这种随机选择的结果如图2所示,同时显示出选择的测量结果,用不同颜色表示。
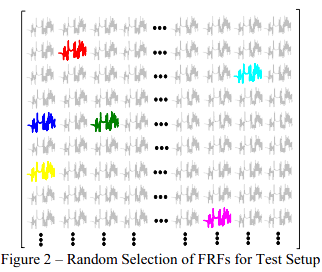
图 2 – 随机选择FRFs进行试验设置
检查FRFs,注意一个一个测量结果地识别FRFs中的峰。如果所有的峰都相同,没有得到其他的峰,那么从测得的这些测量结果中可能合理地选择了参考点。遗憾的是,所有的结果是按照有点随机的方式测得的。另外用这种方式,非常有可能丢失某些关键的模态。(我见过,即使是最好的试验工程师偶尔也会丢失结构的主要模态)
另外一种确定可能参考点的可行方法是,在所有可能适合的参考点位置得到一小部分FRFs。这部分FRFs如图3所示意。接着对这个矩阵进行SVD。通过评价这个原始矩阵的子矩阵的SVD(也即按照可控的方式去掉个别的参考点),可以确定重要模态数目的估计。如果得到了相同数量的重要模态,则对于识别系统模态,去掉的参考点不是关键参考点。但是,如果识别的主要模态更少,则对那些不再观察得到的模态,去掉的参考点是重要参考点,应该被保留作为模态试验的参考点。
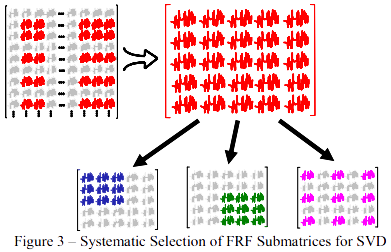
图 3 – 有步骤地选择SVD的FRF子矩阵
所以,尽管测量许多随机选择的FRFs来确定可能的参考点位置是一种习惯做法,但是对于确定可能的参考点,一种可能的替代方法,对一组FRFs用数学方法进行SVD,可能是一种更为严格的机制。这种方法,通常称为试验参考点确定方法(TRIP),提供了参考点确定的一种技术。当没有分析模型,或者当对用于预试验分析的有限元模型的准确度受到怀疑的时候,这种方法特别有用。
这里真正的窍门是选择一个合理的\large \it{u_{i}u_{j}}项,这样参考点位置的模态振型值是一个大的数值。这就会使FRFs有明显的峰,允许得到可用的测量结果。当然为了完成这一点,你必须了解一下系统模态振型是什么。对完成这一点,有限元模态或先验知识很有帮助。
如果你有关于模态分析的任何其他问题,尽管问我好了。
![]()
上一篇:55. 模态空间07.02 – 所有的模态指示函数之间有什么区别?它们都是干嘛用?
下一篇:57. 模态空间07.06 — 如何解释稳态图?另外数据点如何影响拟合?
![]()
扩展阅读[new]:
《振动:解析与试验模态分析》辛辛那提大学Randall J. Allemang教授(著) KSI科尚仪器 董书伟(译)…