






《振动:解析与试验模态分析》 辛辛那提大学 Randall J. Allemang教授 (著),KSI科尚仪器 董书伟 (译)
今天的工程师面临很多复杂的噪声和振动问题,它们关系到结构的设计和故障排除。从来没有如此多的限制条件,如法规、成本和耐久性等,强加于结构之上。因为这些限制,就设计和材料而言,现代结构通常更为复杂。因此,投入到这些结构中的工程技术必然比以往任何时候都要准确。结构分析工作者必须利用精确而又符合实际的模型进行设计,而试验工作者必须能够准确地确定特定输入力作用下的结构动力响应。
在这些领域中,近来已经开发出很多工具来帮助结构工程师。现在分析工作者利用复杂的有限元程序,如Nastran,来辅助他理解和设计结构。试验工作者有高级的数字信号分析设备,来帮助他量化和理解结构的动力学特性和输入力。但是分析工作者和试验工作者之间少有交流。由于当前问题的复杂性,沟通和思想交流的需求变得更为迫切。
缺乏交流的主要原因是分析工作者和试验工作者相互之间不能理解对方的术语和问题解决方法。下面的讨论将试图填补这个空白。
本讲义的重点是说明频响函数(FRF)测量结果怎样与结构的模态振型和振动频率建立联系。将从解析和试验的角度通过建立数学基础来完成这个总体目标。
讲义分为两部分:单自由度系统和多自由度系统。借助于单自由度系统来定义一些标准术语。多自由度系统进一步分为:无阻尼、比例阻尼和非比例阻尼系统。在整个讨论中,把重点放在频响函数和模态向量之间的关系上。与此同时,将介绍下面的概念:
- 模态频率、特征值、系统极点、特征根(\lambda _{r})
- 模态向量、特征向量(\left \{ \psi_{r},\,\phi_{r} \right \})
- 模态系数(\psi _{pr})、留数(A _{pqr})
- 实模态向量、复模态向量
- 物理坐标、广义坐标
- 主坐标、模态坐标
- 模态质量、模态阻尼和模态刚度(M _{r},\,C_{r},\,K_{r})
- 模态A、模态B\; (M_{A_r},\, M_{B_r})
1.1 自由度
在振动领域,包括模态分析中,任何理论概念的发展都取决于对系统自由度数目(N)这个概念的理解。对于模态分析领域这个概念是极端重要的,因为一个机械系统的振动模态数目等于自由度数目。从实际的角度来看,自由度数目的理论定义与测量自由度(N_{o},\,N_{i})之间的关系常令人费解。为此,作为模态分析讲义的准备工作,先回顾自由度的概念。
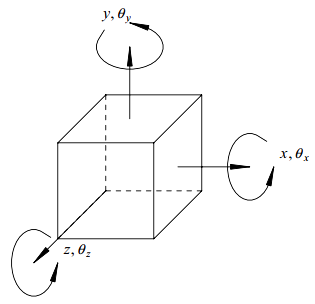
首先,与自由度数目概念相关的基本定义通常包含如下陈述:一个机械系统的自由度数目等于在任意时刻确定机械系统中每个质量的位置及方向所需的独立坐标数目(或最少坐标数)。当这个定义应用于质点时,需要3个自由度,因为要确定质点位置,需要知道质心的x,y,z平动自由度。当这个定义应用于刚体时,需要6个自由度,因为除了需要x,y,z平动自由度之外,还需要\theta_{x},\theta_{y},\theta_{z}转动自由度来确定刚体质量任意时刻的方位和位置。这个概念如图1-1中所示。当这个概念推广到任意一般变形体时,显然可以认为自由度数目是无穷大的。理论上讲这是对的,但一般情况下,尤其是有限元方法,却是将一个一般变形体看作是由非常多的感兴趣的物理点构成的,每个物理点有6个自由度。这样无穷大的自由度数目可以缩减为一个很大但有限的数。
对于一个机械系统自由度数目的理论概念,考虑到测量结果的局限性,理论自由度数目(N)与测量自由度数目(N_{o},\,N_{i})是不同的。对一般变形体,自由度数目(N)最初可以看作是无穷大的,或者如前面章节所讨论,当只考虑有限个感兴趣的物理点时,它等于某个很大的有限数。第一个需要考虑到的测量局限性是,一般情况下感兴趣的分析频率范围是有限的。例如,汽车的大多数主要结构振动模态位于0 \sim 200Hz之间。当考虑这个限制时,感兴趣的系统自由度数现在就从无穷大缩小至一个合理的有限数。下一个需要考虑的测量局限性是测量系统幅值的物理限制。传感器,信号调理以及数据采集系统致使测量结果的动态范围在80 \sim 100dB \, (10^{4} \sim 10^{5})之间。这意味着由于测量仪器的动态范围限制,自由度数进一步减小。最后因为目前几乎没有转动量测量传感器,通常只能测量平动量(位移,速度,加速度,力),因此没有包含转动效应,或转动自由度RDOF。总的来说,即使对于一般变形体,感兴趣的理论自由度数被限定为一个比较合理的有限数(N=1 \sim 50)。因此,自由度数目(N)就是感兴趣的振动模态数目。
那么最终测量自由度数(N_{o},\,N_{i})可以定义为测量结果所在的物理位置数目乘以每个物理位置上的测量结果数目。例如,如果一般变形体上的100个物理位置中,在每一个位置都测量x,y和z加速度,那么测量自由度数等于300。显然物理位置的选取是有点任意性的,当然也就没有感兴趣的振动模态的准确信息,所以,自由度数(N)与测量自由度数(N_{o},\,N_{i})之间没有特定关系。一般来讲,为了确定一个机械系统的N阶振动模态,N_{o},N_{i}必须等于或大于N。也要注意到,即使N_{o},N_{i}大于N,也不能保证能从N_{o},N_{i}测量自由度中求得N阶振动模态。N_{o},N_{i}测量自由度必须包含能够唯一确定N阶振动模态的物理位置。例如,在机械系统N阶振动模态的某一阶模态的活动位置中,如果没有任何一个测量自由度处于其上,那么就无法获得此阶模态参数。
在下面章节的单、多自由度内容的推导中,假定存在一组N个的测量自由度(N_{o},\,N_{i}=N),它允许确定N阶振动模态。现实中,因为没有振动模态的先验知识,N_{o},N_{i}总选的远远大于N。如果这组N_{o},N_{i}测量自由度足够大,并且均匀分布在一般变形体上,则通常可以求得N阶振动模态。
1.2 基本假设
在理论推导之前必须先建立一些基本假设。第一个假设是,结构是线性系统,其动力学特性可以由一组线性二阶微分方程表示。第二个假设是,在试验过程中,可以认为结构是线性时不变的。这个假设意味着线性二阶微分方程的系数是常系数,不随着时间的改变而改变。第三个假设是,结构是可观的。尽管这似乎微不足道,但它意味着影响动力学的系统特性是可以测量的,也意味着有足够多的传感器充分描述系统的输入-输出特性。另外常做的一个假设是,结构符合Maxwell互易性定理。在频响函数测量方面,Maxwell互易性意味着如下内容:通过在p点激励、q点测量响应得到的p、q点之间的频响函数,跟在q点激励、p点测量响应得到的频响函数相同(H_{pq}=H_{qp})。
![]()
![]()
扩展阅读[new]:
《模态空间系列文章》Peter Avitabile教授(著) KSI科尚仪器 董书伟(译)…
《振动:试验模态分析》辛辛那提大学Randall J. Allemang教授(著) KSI科尚仪器 董书伟(译)…[new]