






《振动:解析与试验模态分析》 辛辛那提大学 Randall J. Allemang教授 (著),KSI科尚仪器 董书伟 (译)
目录
2.1 理论
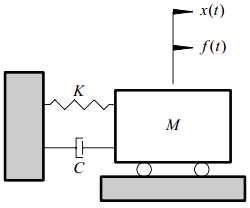
根据牛顿第二定律,单自由度系统的一般数学表达式如式2.1所示:
系统框图如图2-1所示。
式2.1是一个线性时不变二阶微分方程。这个问题的全解包含如下两部分:
其中:
- x_{c}(t)\;-\;瞬态部分
- x_{p}(t)\;-\;稳态部分
假设f(t) = 0,可以求解式2.1的齐次(瞬态)形式。
根据微分方程理论,可以假定其解具有x_{c}(t)=Xe^{st}的形式,其中,s为待定常数。求导并代入式2.2得到:
因此,要有非零解\big(X(s)e^{st} \neq 0 \big ),则
式2.3为系统特征方程,其根\lambda _{1}和\lambda _{2}(\lambda – 系统极点)为:
因此,式2.1的齐次解为:
其中,X_{1}和X_{2}为常数,由t=0时作用在系统上的初始条件决定。
特解(稳态解)是激振力函数形式的函数。如果激振力函数为单频的纯正弦波,则响应也是同频的单频正弦波,如果激振力函数是随机形式的,则响应也是随机的。
2.2 拉氏域理论
式2.1是图(2-1)中系统的时域表达方式。可以得到一个拉氏域(s域)内的等效运动方程。这种表达方式的优点是将微分方程转换为代数方程。它是通过对式2.1进行拉氏变换实现的,因此:
因此,式2.1变为:
其中:
- x(0)为t=0时刻的初始位移
- \dot{x}(0)为t=0时刻的初始速度
如果初始条件为零,则式2.4变为:
令B(s)=M\,s^2+C\,s+K。称B(s)为系统阻抗。则式2.5变为:
式2.6是式2.1在拉氏域中的等价表达形式。拉氏域(s域)可认为是复频率s=\sigma+j \omega。因此,式2.6中的量作如下示:
- F(s)\,- 激振力函数f(t)的拉氏域(复频率)表示
- X(s)\,- 系统响应x(t)的拉氏域(复频率)表示
式2.6表明系统响应X(s)通过B(s)量与系统激振力函数F(s)直接联系在一起。如果系统激振力函数F(s)及响应X(s)已知,则可求得B(s),也即:
很多时候,我们希望知道一个已知输入F(s)引起的系统响应是什么,也就是:
定义H(s)=\dfrac{1}{B(s)},式2.7变为:
称H(s)为系统传递函数。换句话讲,传递函数建立了系统输入的拉氏变换与系统响应的拉氏变换之间的关系。根据式2.5和2.8,可以定义传递函数为:
假定初始条件为零。
称分母为系统特征方程。特征方程的根为:
注意传递函数的上述定义建立了一种解析模型形式,可用于描述传递函数。这个解析模型包含带标量系数的分子和分母多项式。对单自由度情形,分子多项式为零阶,分母多项式为二阶。
2.3 名词解释
2.3.1 临界阻尼
临界阻尼C_c定义为使特征方程中的根式项等于零时的阻尼值。
2.3.2 临界阻尼分数 – 阻尼比(\zeta)
临界阻尼分数,或者说临界阻尼比,\zeta,为系统实际阻尼与系统临界阻尼之比。
现在,特征方程2.10的根可写为:
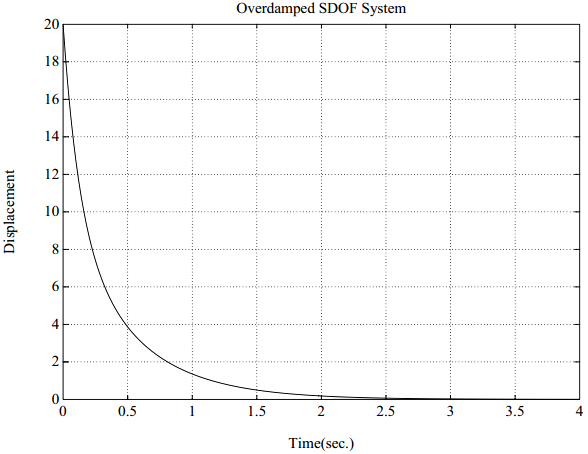
2.4 系统分类
可以根据它们的阻尼比对系统进行分类,也即:
- 过阻尼系统: \quad \zeta _{1} > 1
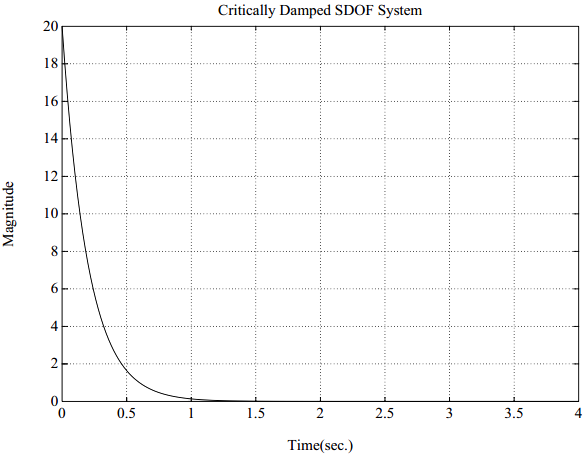
- 临界阻尼系统: \, \zeta _{1} = 1
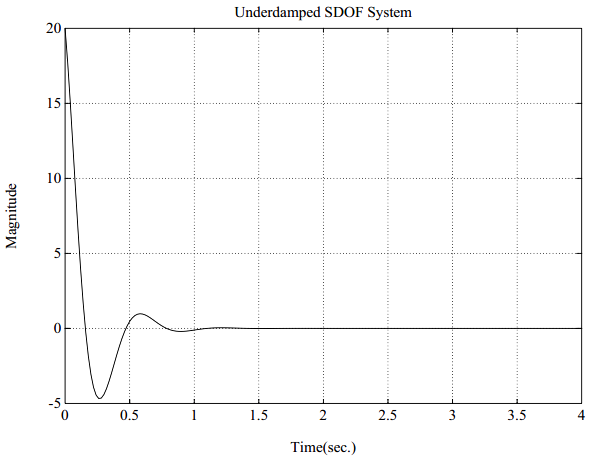
- 欠阻尼系统:\quad \zeta _{1} \lt 1
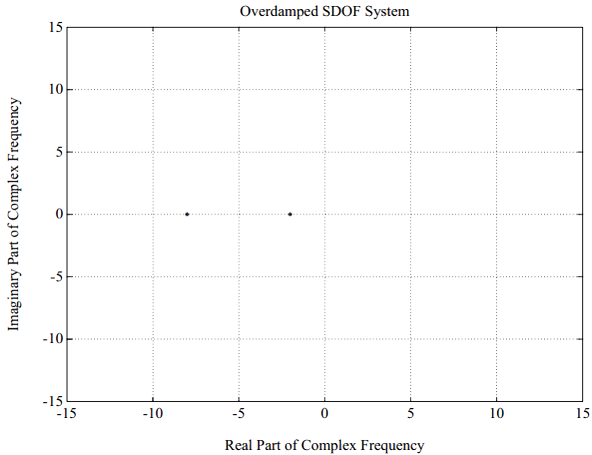
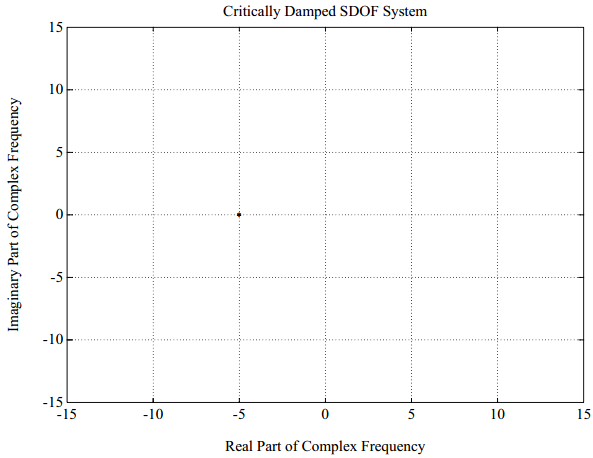
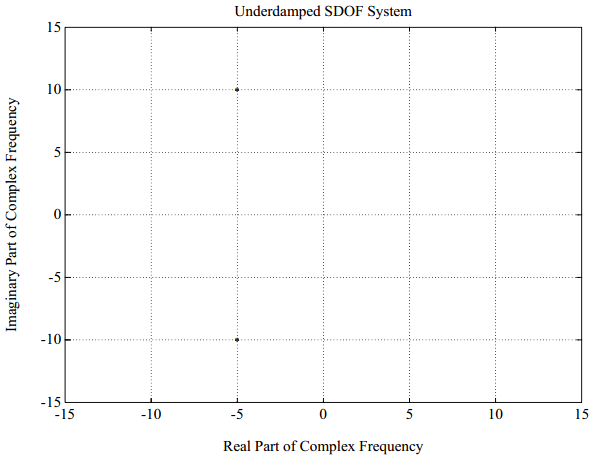
图(2-2)-(2-4)描绘了这三种不同情况下的典型时域响应。接下来的图描绘了特征方程的根在s-平面上的位置。图(2-5)(过阻尼)显示了两个实数根,它们落在\sigma轴上,如果阻尼增大,两个根将分开的更远。对于图(2-6)(临界阻尼),有两个相同的实数重根。对图2-7(欠阻尼),有两个复根,互为共轭。当阻尼和/或频率变化时,这些根落在图的第2和第3象限内。应该指出,如果特征方程的任意根落在j \omega轴的右侧,系统将不稳定。
图(2-5)-(2-7)显示了在这三种情况下,每一种情况的特征方程的根在s平面(或拉氏平面)内的位置。
大多数实际结构的阻尼比很少有大于10 \%的,除非施加了主动阻尼机制。因此,我们在下面部分只限于讨论欠阻尼情形 \zeta _{1} \lt 1。对欠阻尼系统,特征方程的根可写为:
其中:
- \sigma _{1} 为阻尼因子(单位rad/sec)
- \omega _{1} 为阻尼固有频率
注意在这种情况下, \lambda _{2}总是 \lambda _{1}的共轭。因此,在下面的式子中,将用 \lambda _{1}^{*}代替 \lambda _{2}。
利用式2.11,上述参数可以建立阻尼比 ( \zeta _{1} )和无阻尼固有频率 ( \Omega _{1} )之间的关系,如下:
现在,传递函数H(s)可以写为根的因子项相乘的形式,如下:
其中:
- \lambda \;\,=\;传递函数的极点
- \lambda _{1} = \sigma _{1}+j \omega _{1}
- \lambda _{1}^{*} = \sigma _{1} - j \omega _{1}
也可以俯视观察s-平面上的单自由度系统极点,如图(2-8)所示:
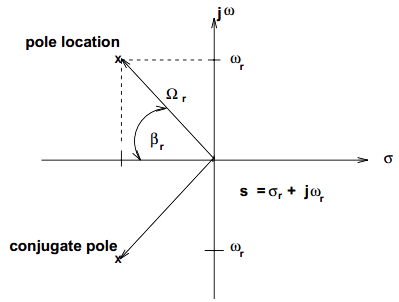
- \sigma _{r} - \;阻尼系数
- \omega _{r} - \;阻尼固有频率
- \Omega _{r} - \;共振频率(无阻尼固有频率)
- \zeta _{r}=\cos \beta _{r} - \;阻尼因子(或称为临界阻尼百分比)
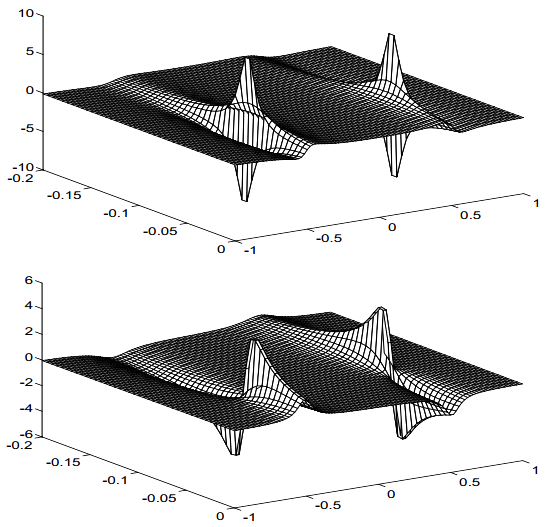
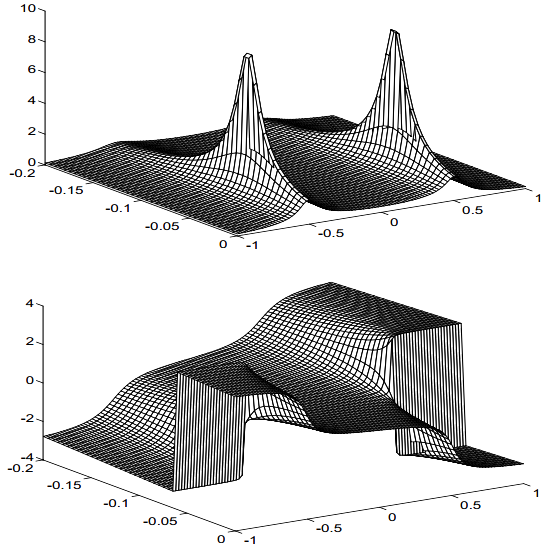
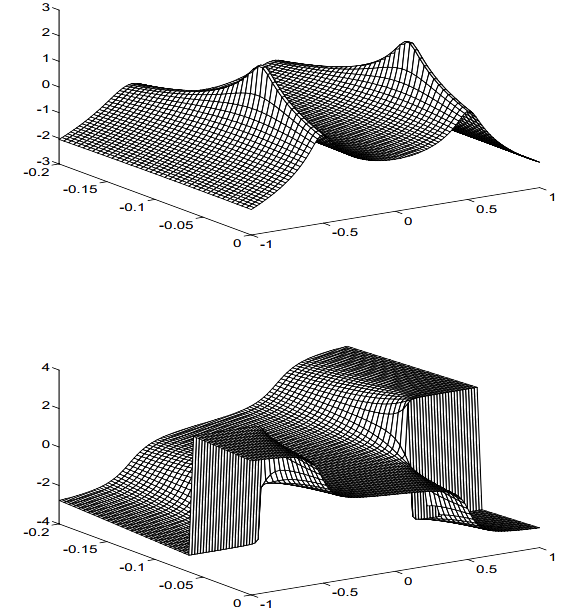
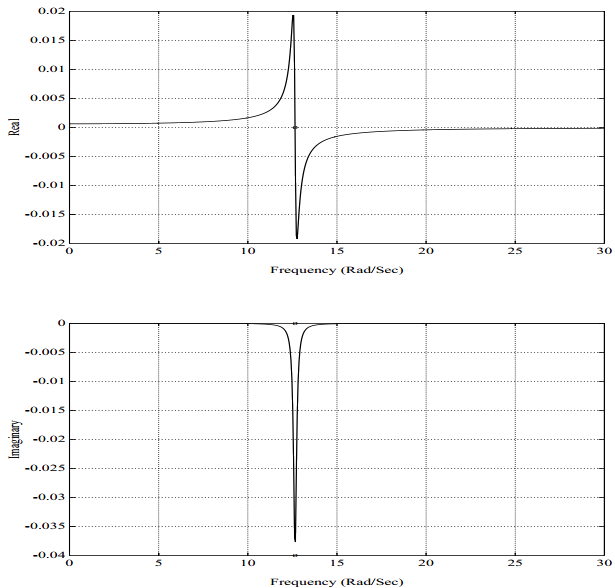
图(2-9)-(2-11)描绘了式2.12的三维图形。图(2-9)按照实部/虚部方式呈现为曲面的方式,图(2-10)按幅值/相位方式表示相同的数据,图(2-11)使用对数幅值/相位方式。记住式2.12中的变量s为复数变量,也即,它具有实部和虚部。因此,它可以看作是两个变量的函数,代表曲面。也注意到,典型的FRF频响函数测量估计是这些面在s=j \omega 处的切片。
2.5 解析模型-标量多项式
一个非常通行的传递函数的表示方法是按标量多项式来表示分子和分母。对单自由度情况,这是非常简单的概念,它直接建立在系统的物理特性(M,\,C,\,K)基础之上。将式(2.9)进行推广,得到:
又可写为:
这个模型是很多模态参数估计方法的基础,也是控制理论应用中的一个通用表达式。
2.6 解析模型-部分分式
现在可以根据传递函数方程部分分式展开的形式来讨论留数的概念。这恰好也是确定留数的一个常用方法。另外一个普遍做法是将分子和分母按多项式表示。
式2.12按照部分分式形式可表示为:
定义常数c_1,c_2为传递函数的留数。留数术语和推导源自于复分析中解析函数的赋值运算。后面可以看到,传递函数的留数与脉冲响应函数的幅值直接相关。在式2.15两侧同乘以(s- \lambda_1)并求取s = \lambda_1时的值,可以得到常数c_1和c_2(留数),因此:
则有:
同理,可得:
一般情况下,对于多自由度系统,留数A_1为复数。但对于单自由度系统,如上所示,A_1为纯虚数。
因此:
2.7 频响函数
沿j \omega(频率)轴求得的传递函数(曲面)的值为频响函数。因此,根据前面推导的方程,可得:
多项式模型
部分分式模型
从试验的角度讲,当我们说测量一个传递函数时,实际上是在测量频响函数。
在系统的阻尼固有频率处,频响函数的值为:
它可以近似为:
当\omega_1增大时,式2.18右侧的第2项趋向于零。换句话说,频响函数负频率部分的贡献可以忽略不计。
因此,很多单自由度系统的模型可以表示为:
对单自由度系统,式2.17的另一种解释方法是,在某个特定频率(\omega)下的传递函数值是留数、阻尼和阻尼固有频率的函数。
2.8 脉冲响应函数表达式
假设初始条件为零,并且系统脉冲的F(s) = 1,则单自由度系统的脉冲响应函数可以根据式2.17确定。则有:
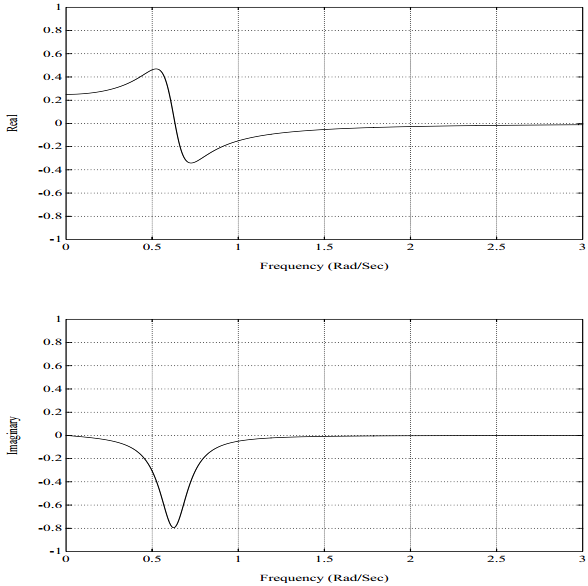
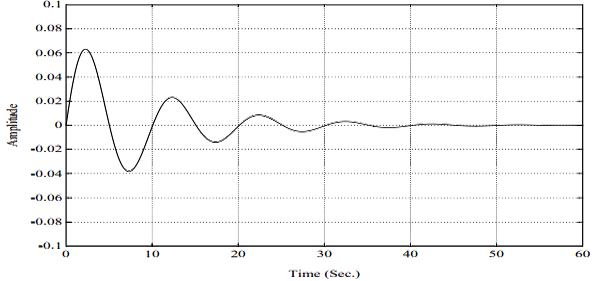
因此,利用e^{j \omega_{1}t}和e^{-j \omega_{1}t}的欧拉公式,留数A_1限定了脉冲响应的初始幅值,极点实部为衰减率,虚部为振荡频率。图(2-12)和(2-13)分别显示了单自由度系统的频响函数和脉冲响应函数。
2.9 物理参数变化对频响函数的影响
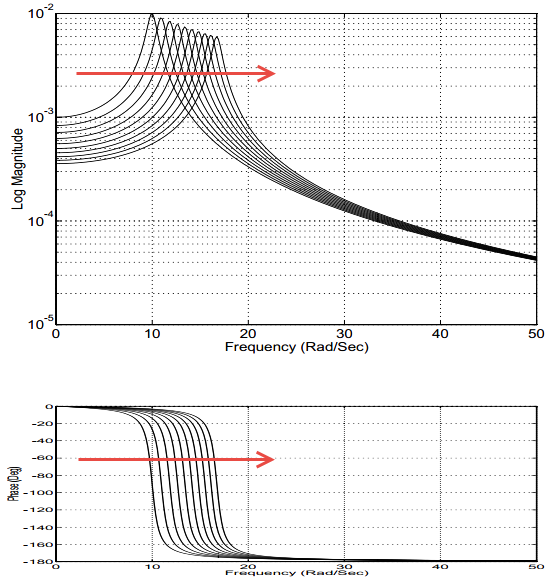
尽管并非总是可以改变系统的物理参数(质量,刚度和/或阻尼),并且实际上只改变某个物理参数(如质量)而不改变其他物理参数(如刚度)是非常困难的。但理解某个物理参数的改变是如何影响系统特性,仍然非常重要。图(2-14),(2-15)和(2-16)显示了一次只改变一个物理参数时,频响函数将受何影响?(备注:图中红色箭头为译者所加,表示对应物理参数增大时,曲线变化的趋势)
注意,刚度变化不仅影响共振频率而且影响系统的低频特性。在低频区刚度占主导,这也是频响函数的这个区间被称为刚度线,或者更准确地讲,柔度线的原因。
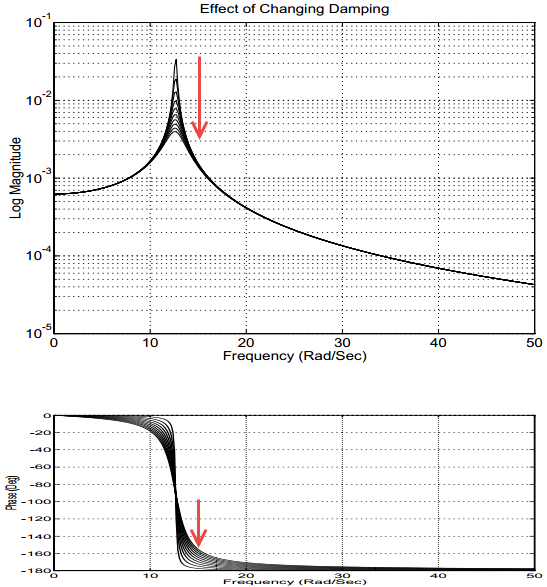
注意,阻尼变化对共振频率没有明显的影响。仅有的比较显著的变化是频响函数在共振频率区域附近的变化。
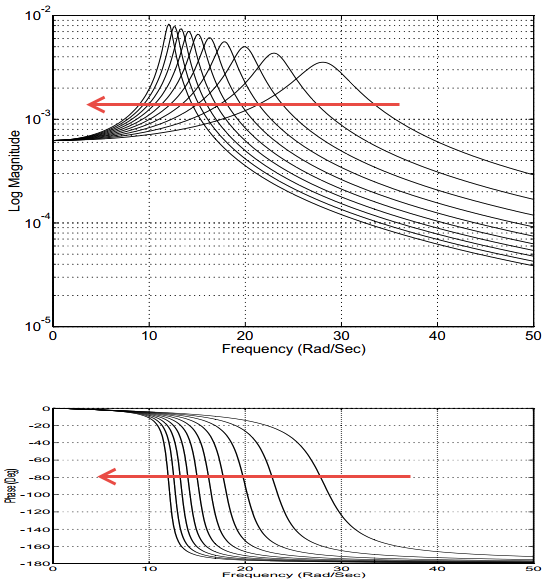
注意,质量的变化不仅影响共振频率,而且影响系统的高频特性。在高频区质量占主导,这也是频响函数的这个区间被称为质量线的原因。也要注意到当质量变化时,视在阻尼(共振频率的尖锐程度)也相应发生变化。质量的变化不仅影响共振频率、系统高频特性,而且影响临界阻尼分数(\zeta_{1}= \dfrac{C}{C_c}= \dfrac{C}{2\,M \Omega_{1}})。
2.10 估计部分分式参数
假设要求解一个小阻尼的单自由度系统(SDOF),我们可以直接根据测得的频响函数,快速地估计出部分分式模型所需的参数。尽管这个方法是建立在单自由度系统基础之上的,但只要各阶模态频率相邻不是很近,此方法也同样可适用于多自由度(MDOF)系统。
从单自由度频响函数的部分分式模型公式出发
必须要估计的只有常数\lambda_1和A_1。因为\lambda_{1}=\sigma_{1}+j \omega_{1},估计过程从估计\omega_1开始。可以按照下列三种办法之一来估计阻尼固有频率\omega_1:
- 频响函数幅值达到最大值处对应的频率
- 频响函数实部过零处对应的频率
- 频响函数虚部达到相对极小值(或极大值)处对应的频率
在所有条件下,这些办法中的最后一个办法给出了最为可靠的结果。
一旦估计出阻尼固有频率\omega_1,就可以估计模态频率的实部,即阻尼因子\sigma_1。可以用半功率带宽法来估计阻尼因子\sigma_1。这种方法利用频响函数在共振频率区域附近的数据,根据下面的公式来估计临界阻尼分数:
上述公式中,\omega_1为先前估计出来的阻尼固有频率。\omega_a为\omega_1左侧,幅值为频响函数峰值0.707倍处的频率。这对应一个半功率点。\omega_b为\omega_1右侧,幅值为频响函数幅值0.707倍处的频率。这也对应一个半功率点。
对小阻尼系统,上述公式可以按照下式来近似:
一旦估计出\zeta_1,就可以根据下式来估计出阻尼因子\sigma_1。
同样,假设系统为小阻尼,\Omega_1 \approx \omega_{1},那么可以根据下式来估计阻尼因子:
一旦模态频率 \lambda _{1} 估计出来,通过求部分分式模型在一个特定频率处的数值,就可以估计出留数A_{1}。如果这个特定频率选作 \omega_{1} ,可得到下列结果。
只要\omega_1不是太小,则上式约等于:
因此,根据下来关系式可以估计出A_1:
在上述关系中,对于位移比力的频响函数H(j \omega_1)非常接近于一个纯虚数值。这意味着留数A_1也同样非常接近于一个纯虚数值。
2.10.1 示例
对于下面的单自由度SDOF情形,(M=100, \, K=1600, \, C=2),可以根据频响函数FRF来估计参数,如下面的几张图所示。准确的答案是\lambda _{1}=-0.10000+j 12.6487,\;A_{1}=-j\,0.0040。注意在阻尼固有频率附近的数值已经列入表2-1。
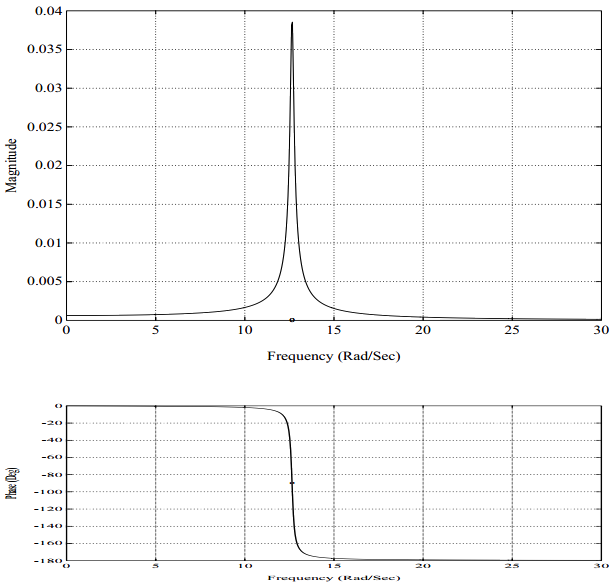
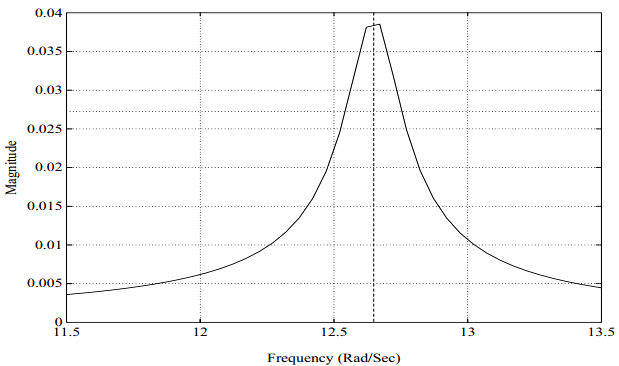
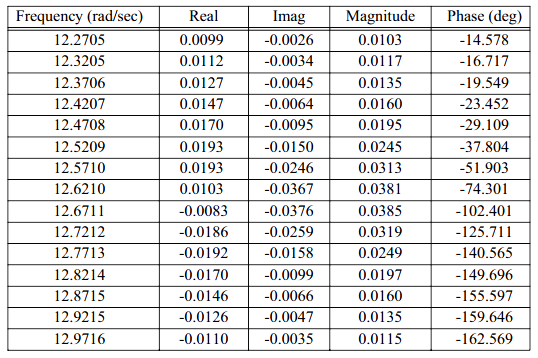
这个例子也暴露出这种简化的模态参数估计的一个普遍问题。在本例中,参考图2-20,显然,阻尼固有频率处于频响函数的两个测量谱线中间。图2-20中,在峰值频率附近,频响函数的明显截断或削顶是由于频率分辨率不够造成。对于小阻尼情况,共振频率处的真实幅值可能要高2\sim 20倍。这意味着不可能找到半功率频率点来估计阻尼,因为真正的共振幅值是不知道的。在这种情况下,阻尼估计值将是错误的(值太大),这导致留数也是错误的(值太大)。
注意,还有其他一些更具鲁棒性的单自由度和多自由度的模态参数估计算法,它们并不需要知道半功率频率点。为了准确估计阻尼值,这些技术仅依赖于所测谱线处的数值准确即可。这些方法没有本例中用到的简化的单自由度情形的准确性问题。
2.11 为何要学习/强调单自由度系统?
常有一种担心,不能保障学习单自由度系统的课时量。大多数多自由度(MDOF)系统可以化简为单自由度系统。在一定频率范围内,多自由度系统常常被分解为多个频率区间,每个区间内仅有一个单自由度占主导。在这种情况下,可以利用单自由度模态参数估计算法。
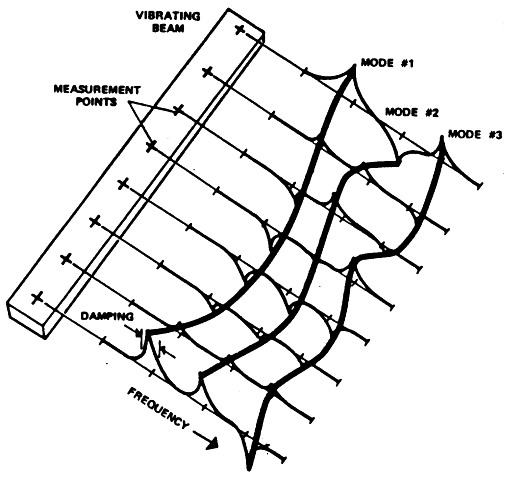
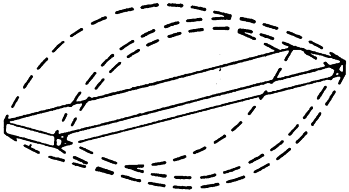
尽管一个连续梁具有无穷多阶模态,但常常利用最基本的单自由度概念来计算这些模态(模态频率,阻尼,矢量和模态归一估计)的数值。首先假设每个振动模态在频率上与其他模态分得比较开。对于小阻尼结构,这是经常发生的情况。梁的各种振动模态如图2-17所示,注意连接各个频响虚部峰值的黑实线。一般情况下,按照线框模型画出这些模态,显示出模态向量的极值,这样就很容易理解运动的情形。图2-21和2-22显示了一个两端为铰支的等截面梁的前两阶弯曲模态。
为了理解为什么可以从频响函数虚部来确定这个振型信息,必须回顾一下单自由度理论,并稍作推广,首先从符号的角度来看。
利用牛顿第二定律得到单自由度系统的通用数学表达式,如式2-29所示:
一般情况下,激振力函数可以由正、余弦项之和表示。激振力函数可以表示为:
假设系统为欠阻尼,且经过了足够长的时间,由初始条件或起始激励引起的系统任何瞬态响应都已经衰减为零,那么系统响应可以表示为:
注意,尽管x(t)和f(t)为实值函数,而X(\omega)和F(\omega)均为复值函数。式2-30和2-31对于任意频率均成立,将式2-30,2-31及2-31的导数代入式2-29,得到单自由度系统的频响函数(FRF)关系式如下:
当在无阻尼固有频率处求值(测量)时,要注意上述频响函数的特性。在无阻尼固有频率处,质量项与刚度项相互抵消,频响函数为纯虚数。
需要进行的第一个推广是,针对x(t)和f(t)不在同一个位置的情形提供一种描述方法。对单自由度系统,这将是冗余信息(没有新内容),但是当推广到多自由度系统时,这就变得重要了。例如,假设在质量上施加作用力的特定点(及方向)称为自由度p,而在质量上测量响应的特定点(及方向)称为自由度q。现在式2-32可以按照如下形式书写,以标识这个信息。
这个系统仍然是一个单自由度系统,所以H_{qp} =H_{pp} =H_{qq} =H_{qs} = \cdots 。但现在可以描述输入、输出位置了。这清楚地表明了模态数目(在这种情况下为1)与用来测量这个系统的输入、输出传感器的数量无关。
需要进行的第二个推广是,要提供一种方法来表明频响函数模型中所反映的输入和输出二者的模态特性(模态系数)。注意到分母与特征方程相关,这样模态频率已经表示出来了。注意到分母中的质量项对方程进行了归一,这也代表了模态归一的一种形式。模态系数信息是相对而非绝对的,可以通过改变分子项,加入模态系数信息来反映这点。
注意到,由于这个系统仍然是一个单自由度系统,每个自由度处的相对运动将归一为1,因此\psi _{p}= \psi _{q} = \psi_{s}=1,这表明式2-33和2-34仍然表示相同的信息。跟之前注意的一样,如果在无阻尼固有频率处求(测量)频响函数的数值,频响函数依然是虚数,且是模态系数和阻尼的函数。假设阻尼未知,但为常数,这意味着模态系数的乘积与频响函数的虚部成比例。
最后,需要进行的第三个推广是从单自由度SDOF变到多自由度MDOF。注意,对于线性系统来讲,可以利用线性叠加定理在频域中将与每阶模态相关联的信息加和在一起,来表示一个多自由度系统的频响函数。为了描述它,式3-34中的每一项都需要一个下脚标(r)来指明信息是与哪一阶模态相关的。频响函数的最终形式是:
式2-35是多自由度系统的频响函数的一种通用表达式。注意分母中的M_r,C_r和K_r项是模态或广义质量,阻尼和刚度参数,而不是物理质量,阻尼和刚度参数。模态或广义参数可以按照解析的方式从物理质量,阻尼和刚度参数中得到,或者利用更为复杂的模态参数识别算法,通过试验得到。
注意到,只要各阶模态在频率上分离得比较开,对指定的某阶模态,无阻尼固有频率附近的信息,可以根据下式得到:
注意,如果输出自由度(点及位置)保持固定不动,而输入自由度移动,则当测量不同的频响函数时,对于感兴趣的某阶模态,式2-36中唯一改变的是与模态系数相关的信息。如果在无阻尼固有频率附近求(测量)式2-36的数值,这意味着频响函数的虚部将与模态系数成比例。这个比例常数\alpha _{r}为:
因为模态振型是相对方式,而非绝对运动,那么这个常数的数值不重要,除非要求取阻尼或者进行模态归一。
因此,可以从阻尼固有频率处的频响函数虚部(或频响函数的幅值和相位信息)估计出模态向量。只要各个无阻尼固有频率分离得比较开,且阻尼小(无阻尼固有频率和阻尼固有频率几乎相等),这将相当准确。
这个结果与展开定理的概念相一致(任意时刻或者任意频率处的系统响应是模态向量的线性组合)。
展开定理-时域:
展开定理-频域:
利用展开定理的频域形式,如果要计算第r阶模态无阻尼固有频率处的响应值,那么展开系数\beta_{r}将占主导,并且将与式2-37中定义的\alpha几乎相等。
![]()
![]()
扩展阅读[new]:
《模态空间系列文章》Peter Avitabile教授 (著) KSI科尚仪器 董书伟 (译)…
《振动:试验模态分析》辛辛那提大学 Randall J. Allemang教授 (著) KSI科尚仪器 董书伟 (译)…[new]